
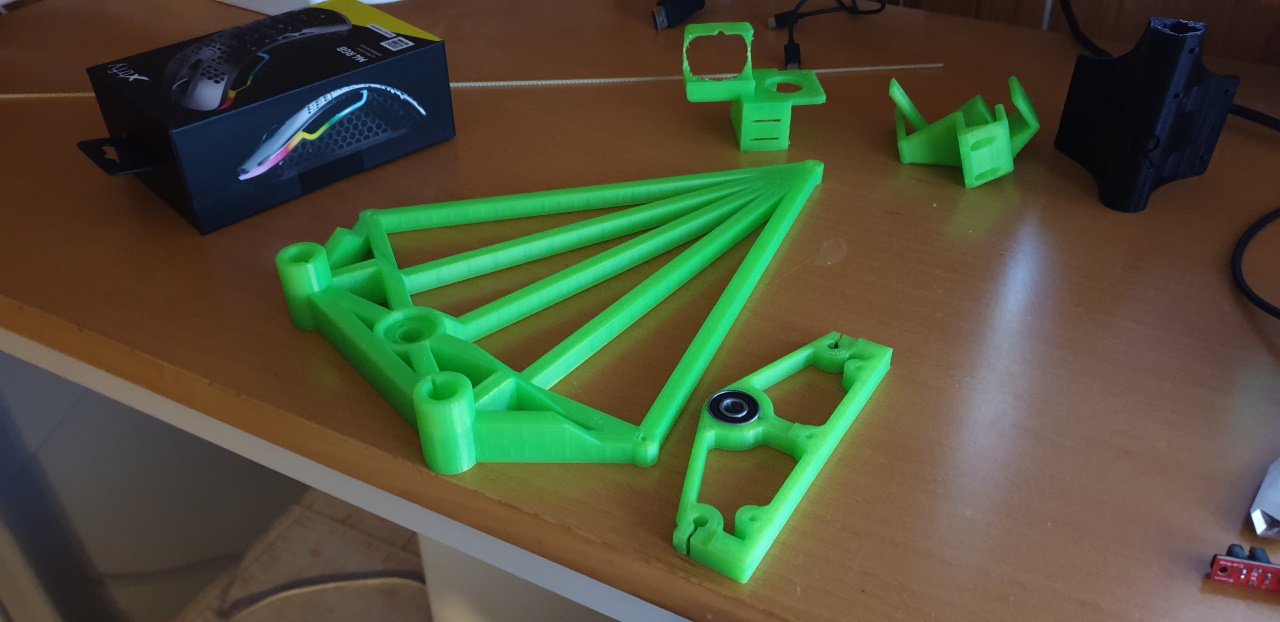
Så var det dags för en uppdatering på RR3Dmini projektet då. Det har hänt en del sedan sist.
Cadden är ”färdig” och jag har printat en hel del testbitar för att få till passformen, men när toleranserna väl var utredda var det bara att köra på. Skriver ut denna på min större skrivare med ett 0,8mm munstycke med 0,25mm lagerhöjd och ~80mm/s skrivhastighet.
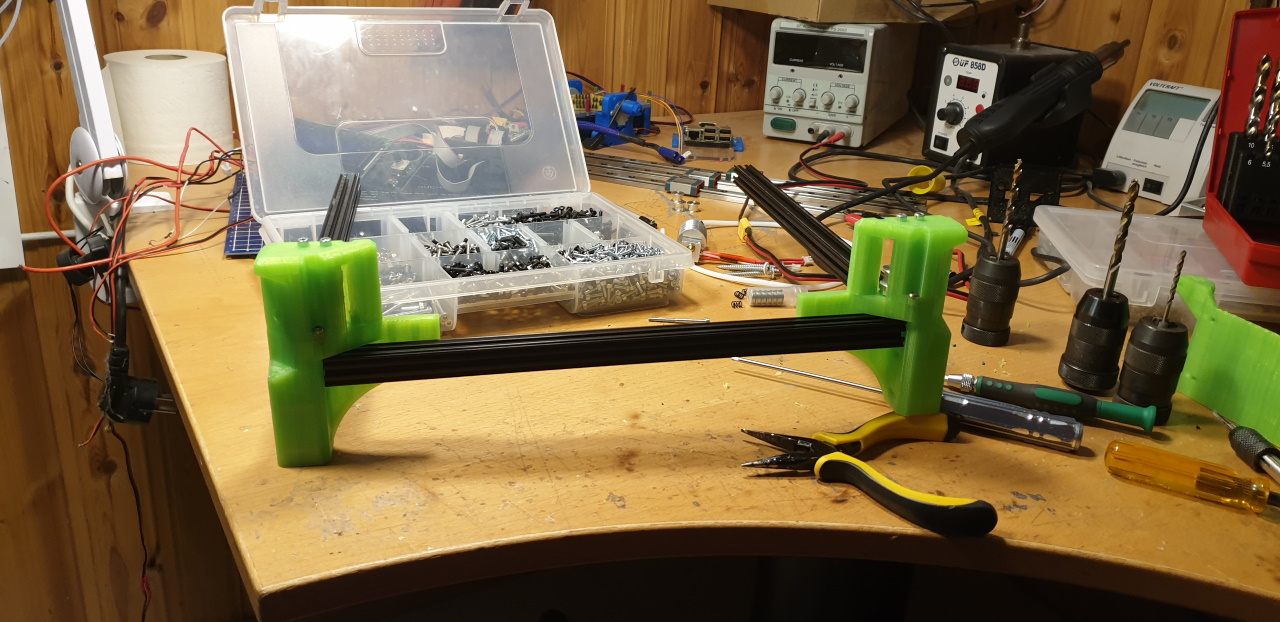
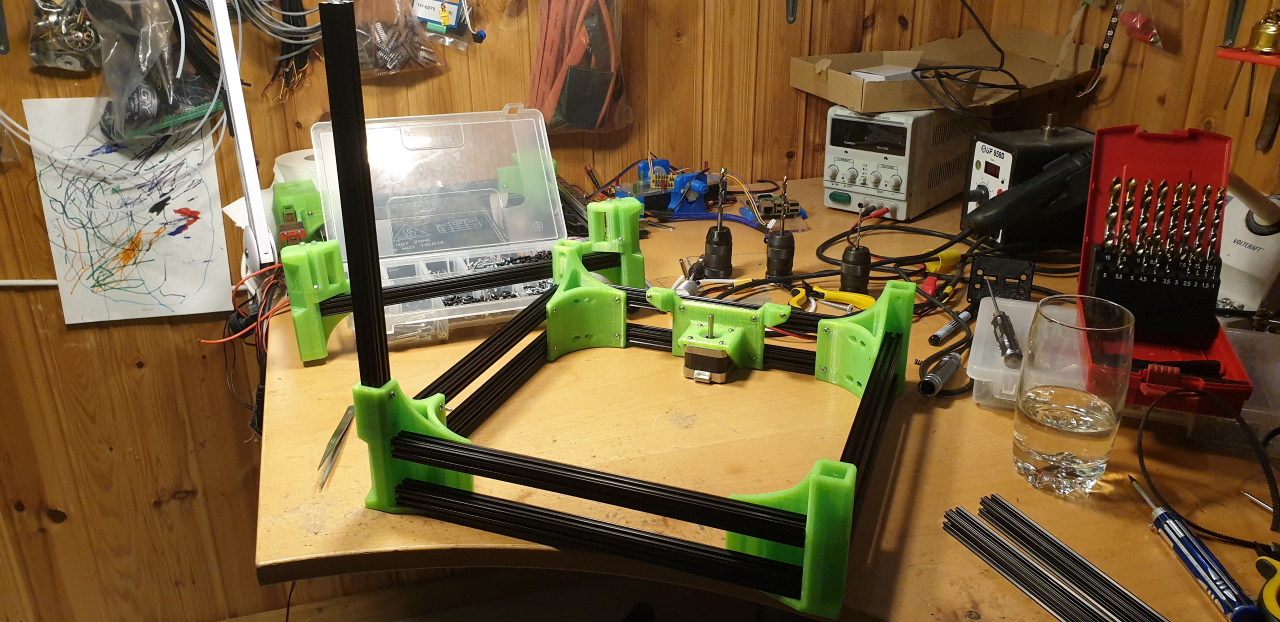
Fötterna testmonteras på de vertikala aluminiumprofilerna. Eftersom att jag använder delarna från min gamla Kossel så kör jag med 300mm långa aluprofiler och bygger runt det för att maximera utskriftsvolymen på lillskrivarn.
1.6mm väggar, 1mm (4 lager) topp och botten och 20% infill ger stabila och snygga delar.
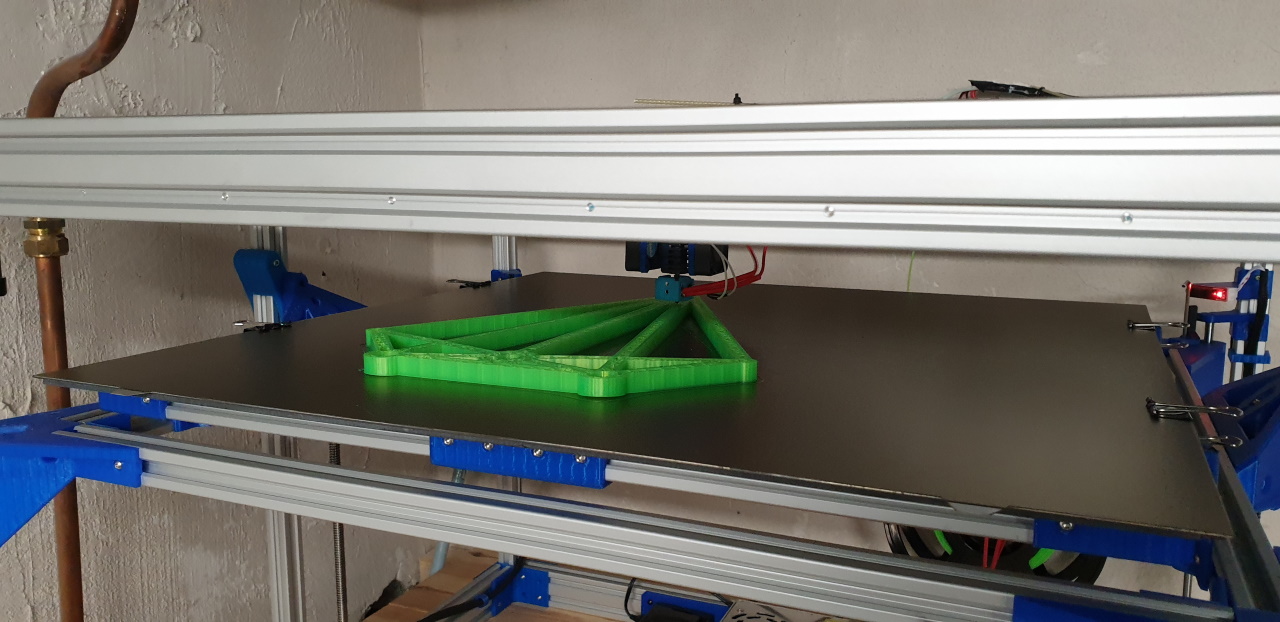
Största printen hittills på storskrivarn blir hållaren till printbeden på minin.

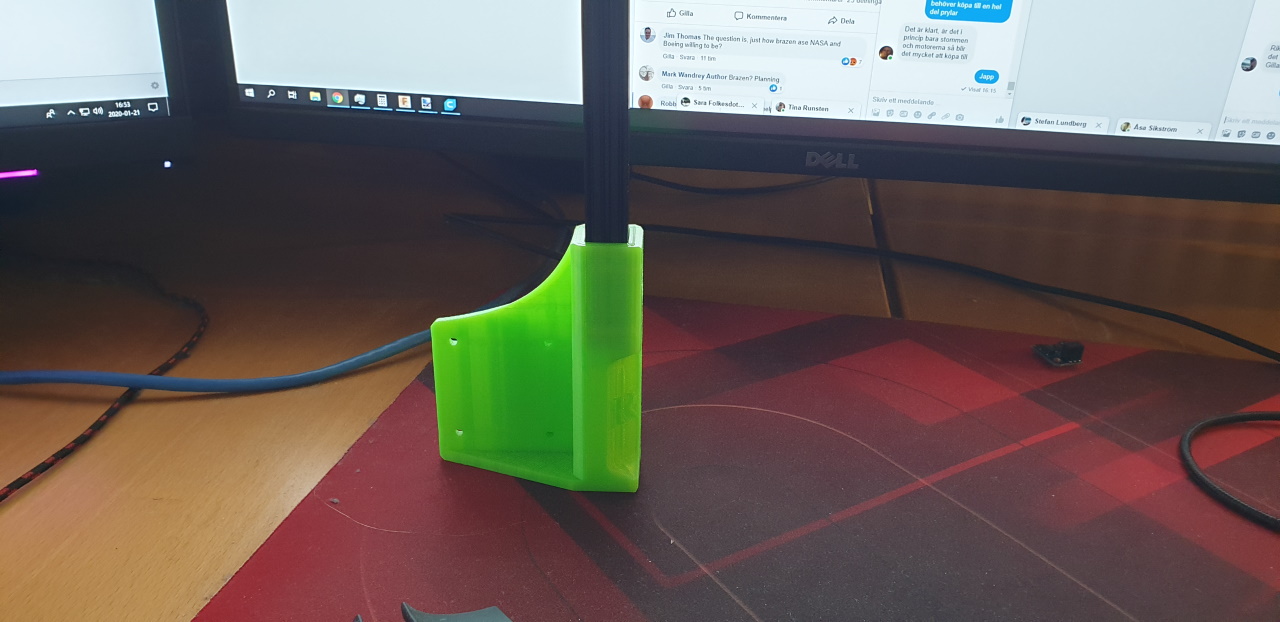
Första versionen av övre lagerhållare och Z-gejderhållare. Denna revideras senare för att hålla kontaktdon, filamenttub och Z-ändlägesbrytare.
Z-gejdrarna monteras löst i övre hållaren.
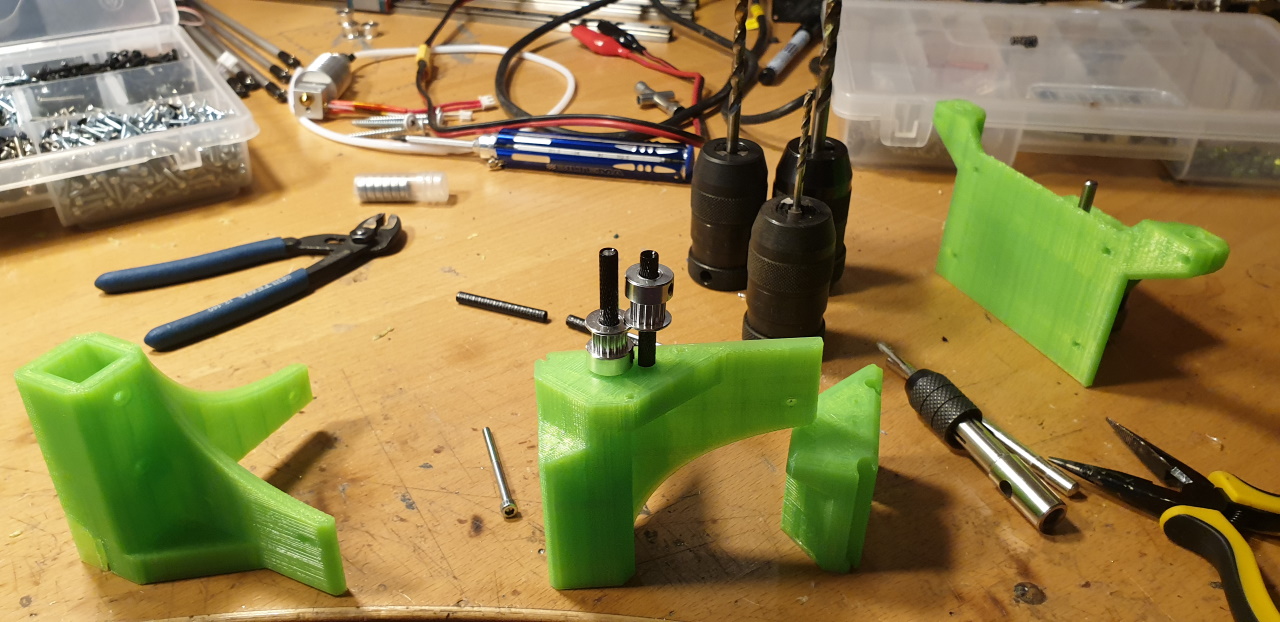
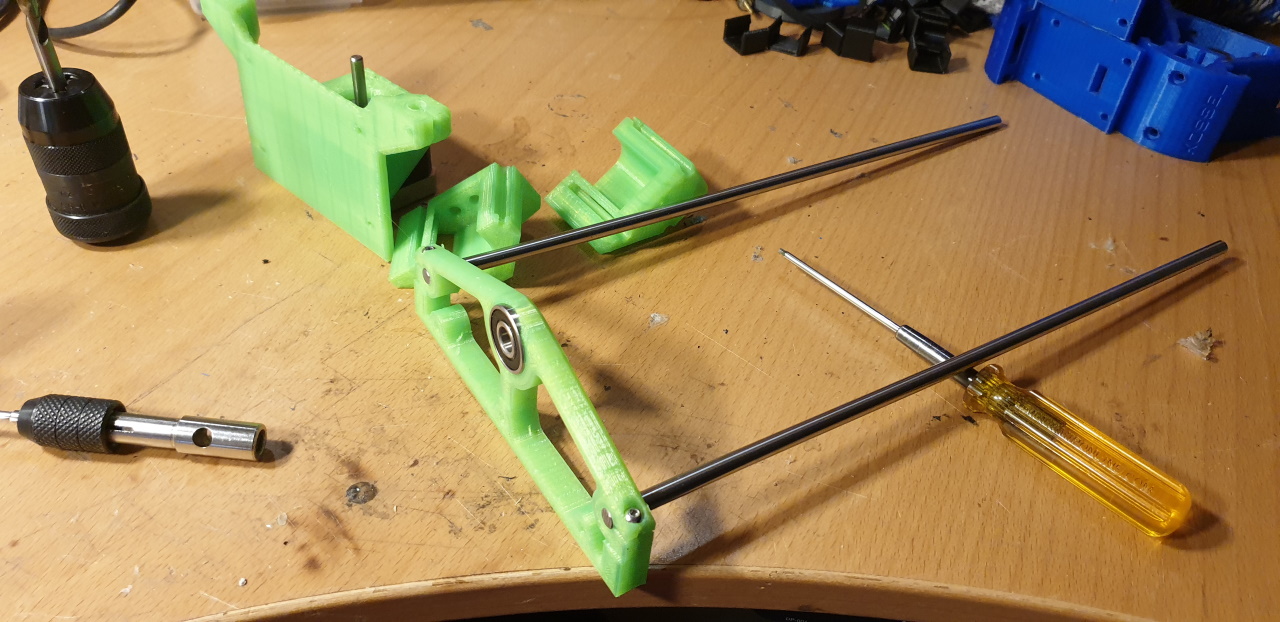
Nästa steg är att förbereda idler-rullarna i de främre övre hörnen. Här använder jag en 5mm aluminiumdistans från våra drönarbyggen och vanliga 16T pulleys – då jag inte hade vanliga idlers så att det räckte till alla rullar. Här använder man fördelaktigen vanliga idlers istället, men man tager vad man haver.
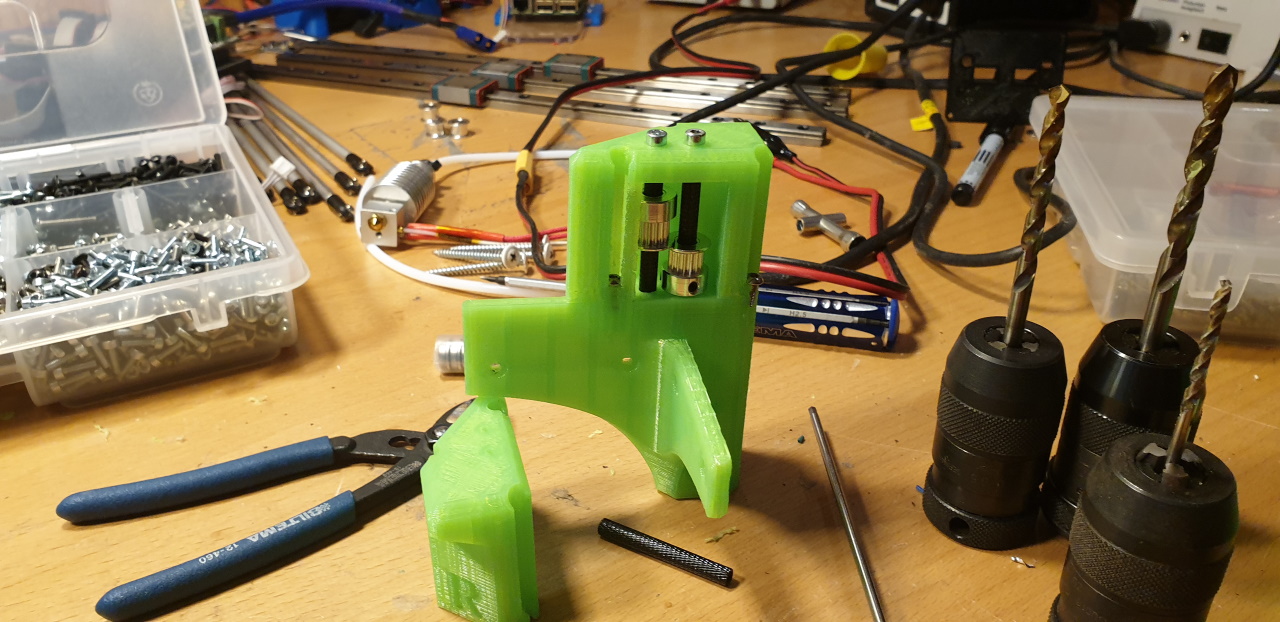
När toppen av övre hörnet är monterat ser det ut såhär..

Båda övre främre hörnen klara.
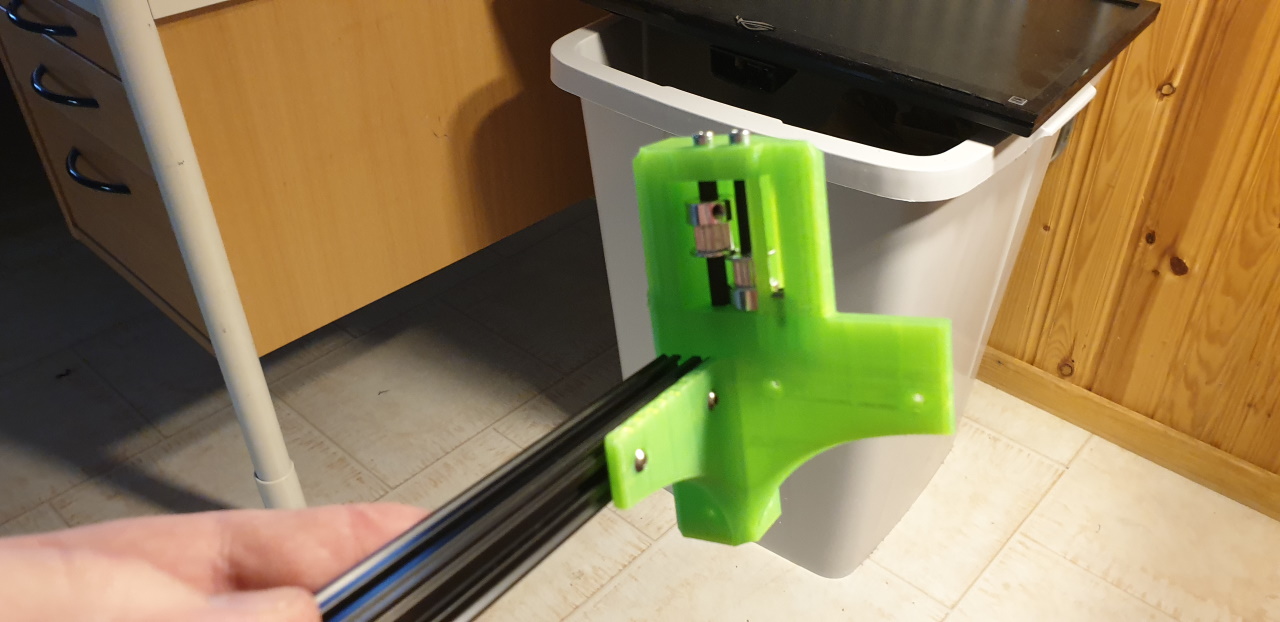
Dessa monteras med M3-skruv och mutter på de övre aluminiumprofilerna.
Enklast är att montera skruv och mutter i hörnet och sedan låta profilen glida på, så slipper man sikta in och pricka muttern bakom hörnet. Det innebär att man måste tänka över i vilken ordning man monterar allt dock, så att man inte monterar in sig i ett hörn.. 😉

Dags att ta tag i det kombinerade hotendfästet/X-gantryt. Första varianten skrev jag ut som en enda bit med stödmaterial och allt vad det innebär, men det blev inte helt bra. En uppdaterad version kommer senare..
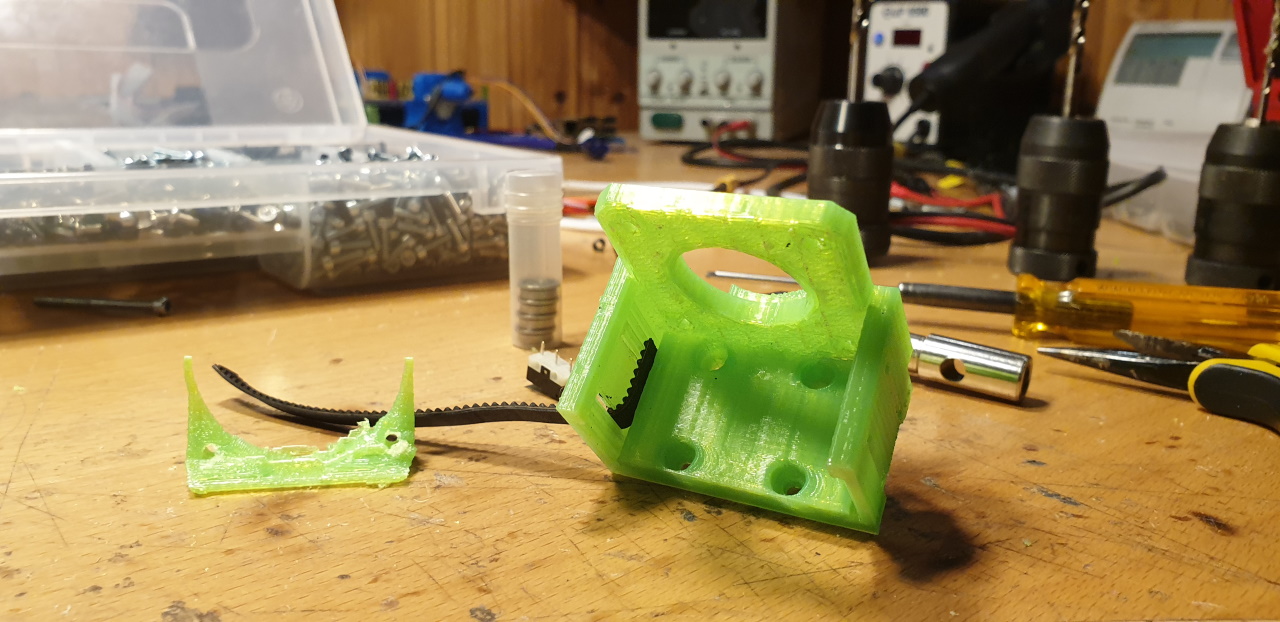
Då jag vill ha maximalt med rörelsemån i X-led får remfästet inte ta särskilt mycket plats alls. Här har jag gjort en 4mm tjock lösning där remmen kläms mellan stegmotorn till extrudern och en plastbit med räfflor som passar remmen. Sitter stenhårt!
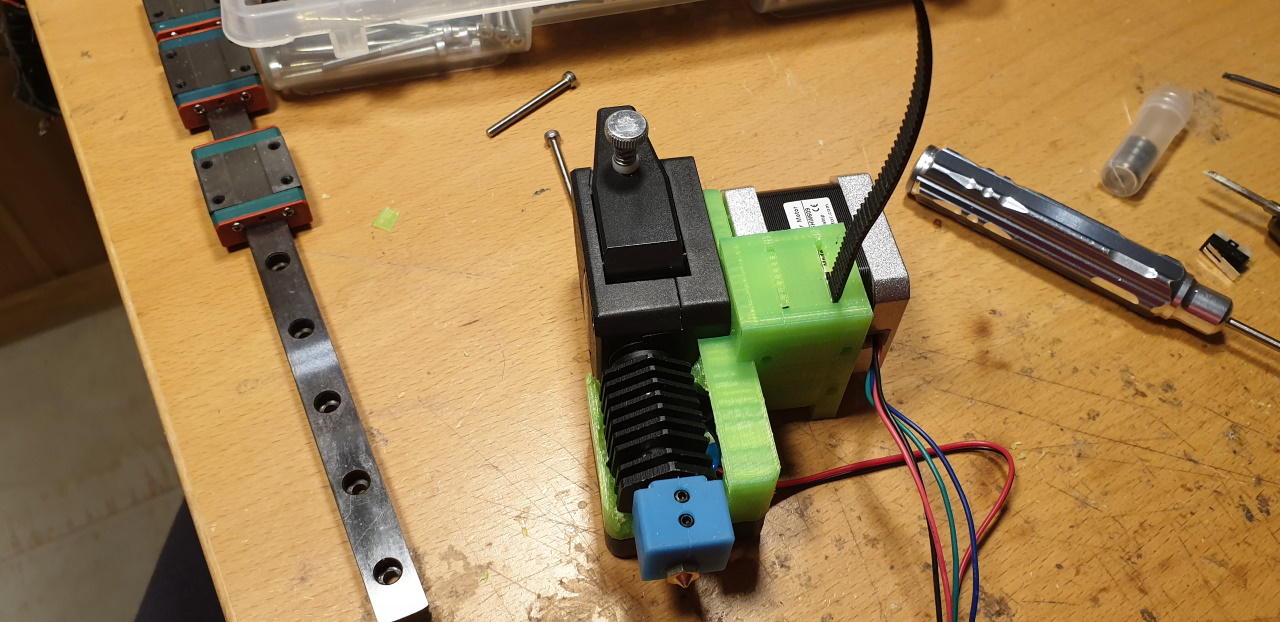
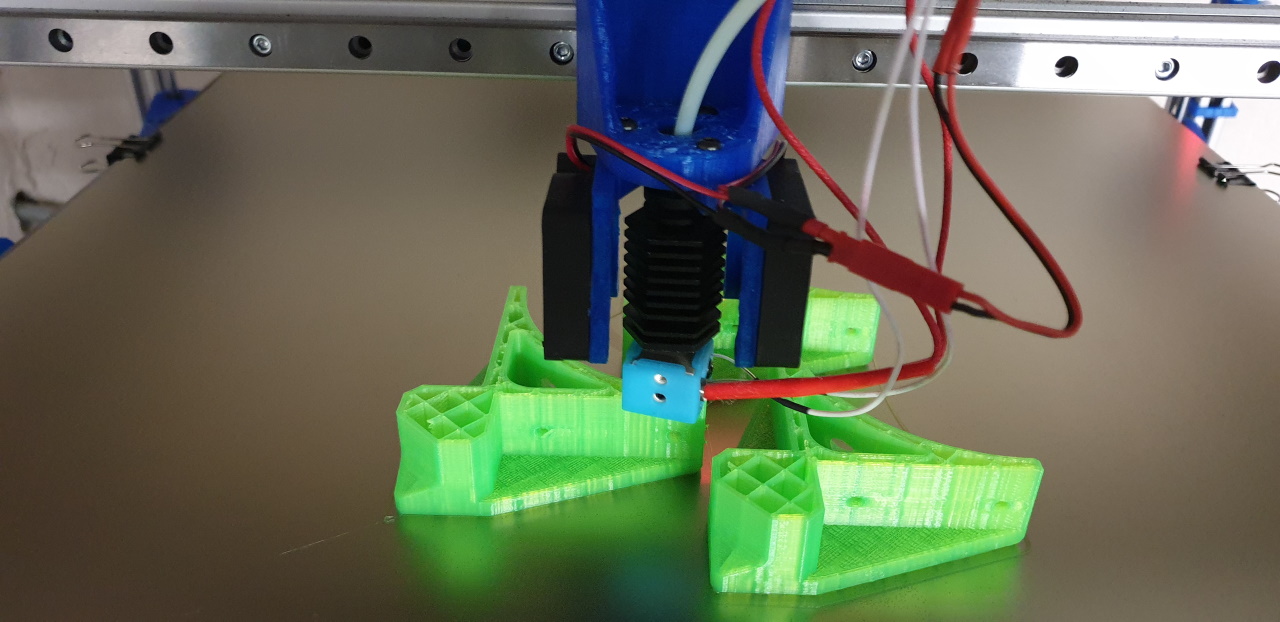
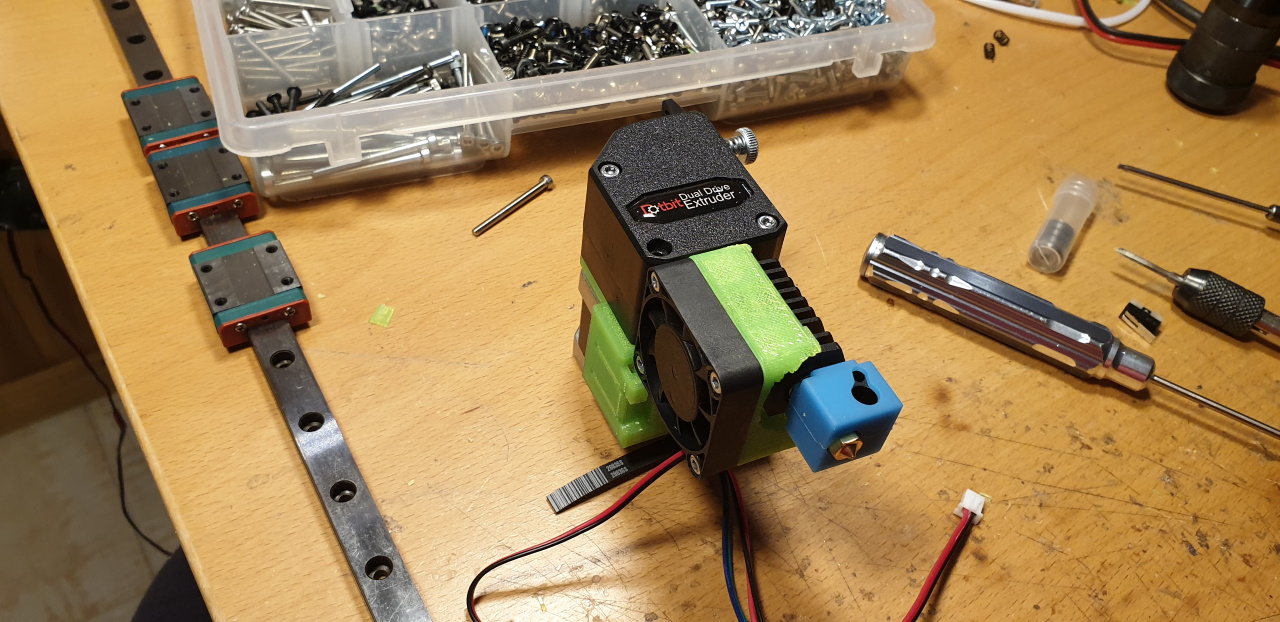
Testmonterat stegmotor och hotend.
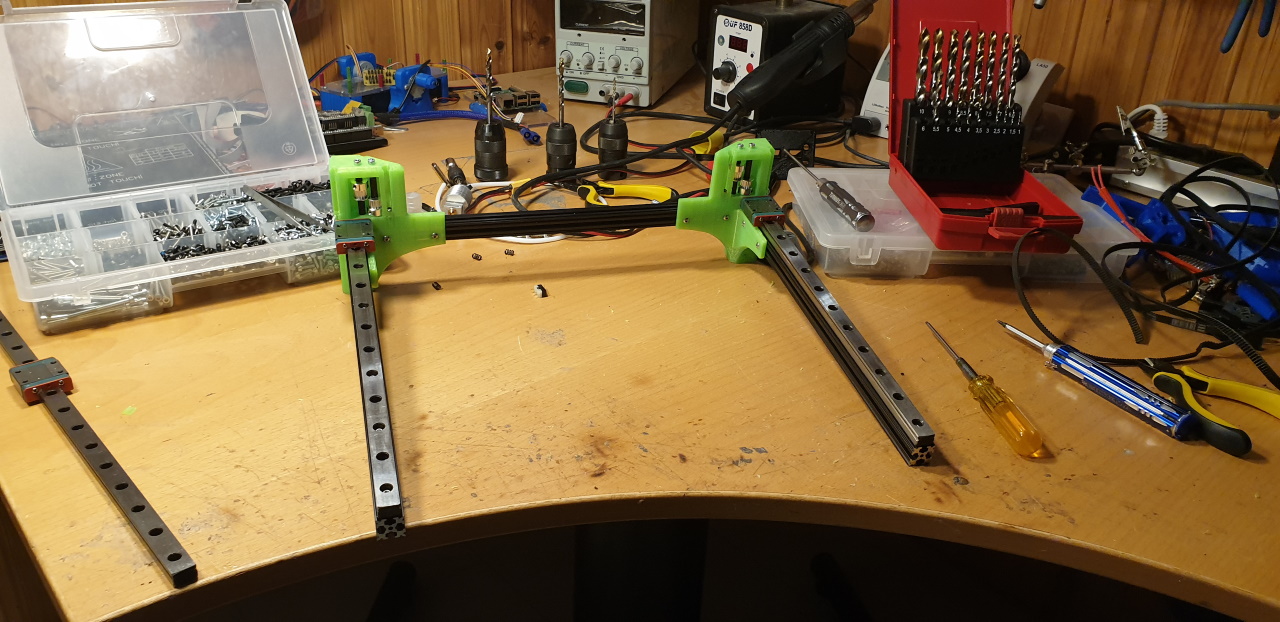
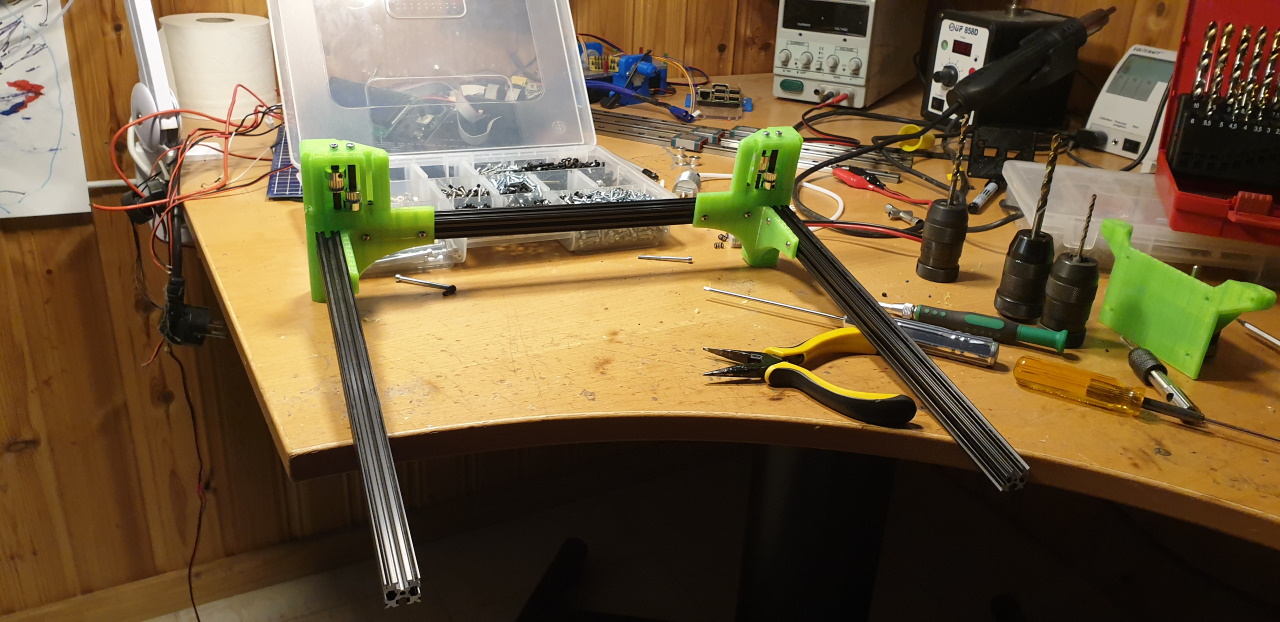
Kapade mina linjärlager 300mm långa och monterade på Y-skenorna.
Sedan blev det montering av de bakre övre hörnen med stegmotorfästen.

Det är viktigt att komma ihåg att lägga i tillräckligt med muttrar i spåren för att montera det som behöver monteras på profilerna i ett senare skede då det inte finns möjlighet att komma åt att göra detta när profilen väl är monterad.
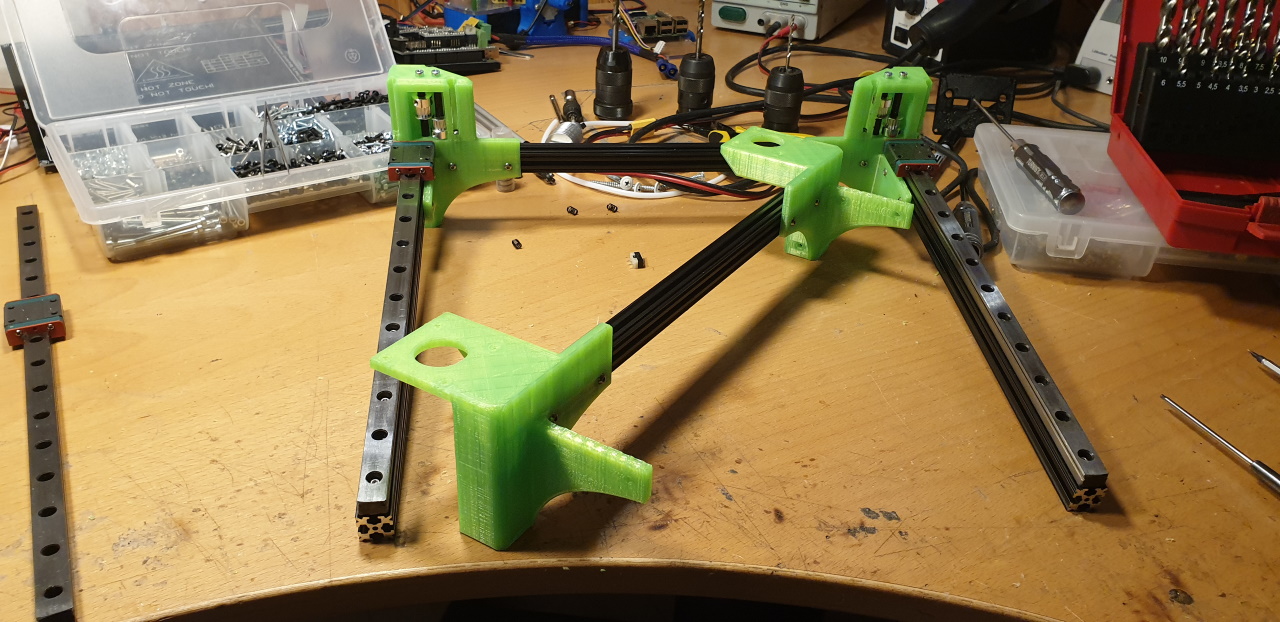
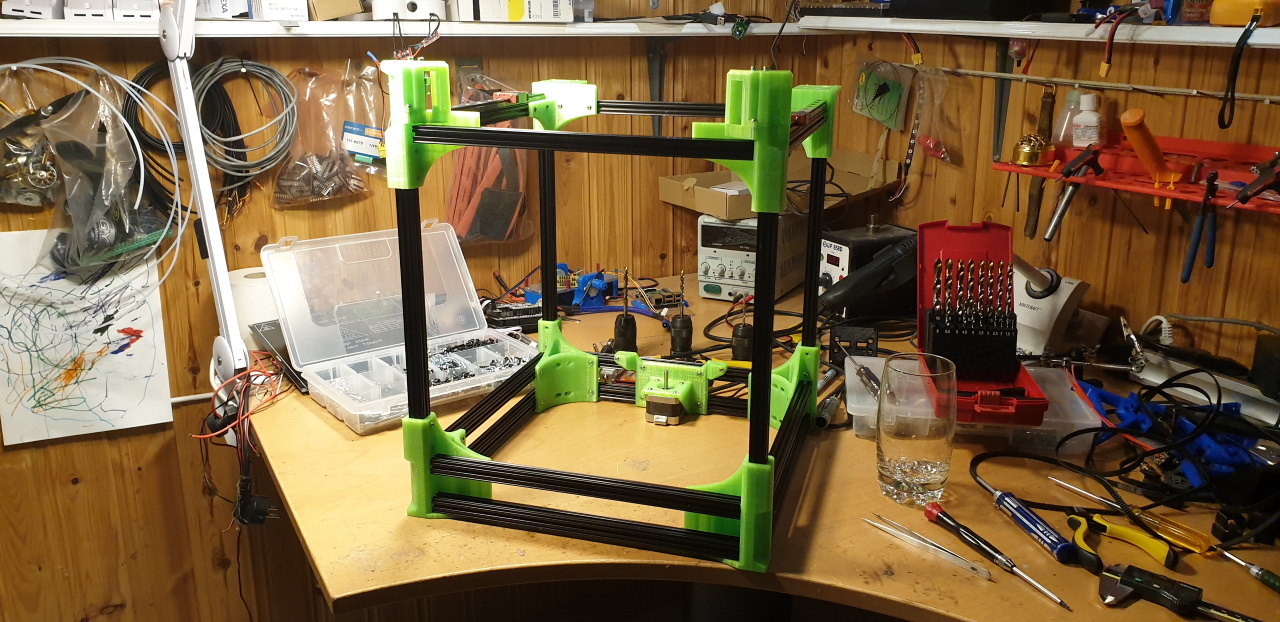
Nu är hela övre våningen av skrivarramen färdig, bara att ta tag i den undre delen.
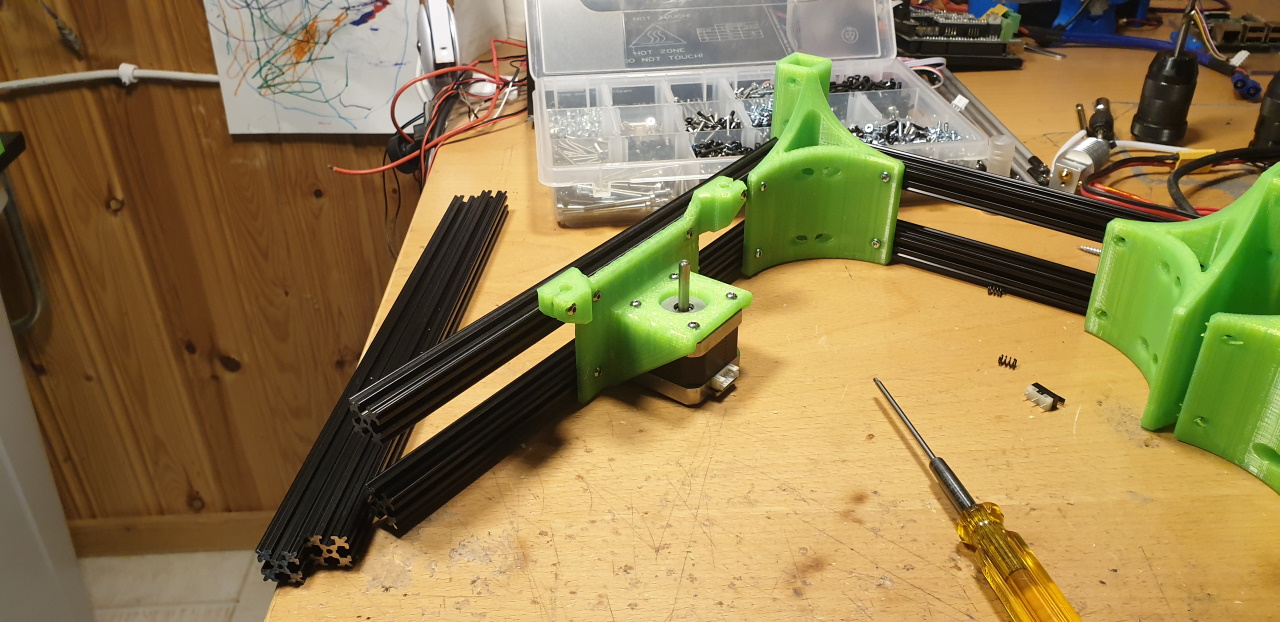
Här kör vi med dubbla profiler för stabilitetens skull. Stegmotorfästet till Z-axeln monteras innan ramen slutförs.
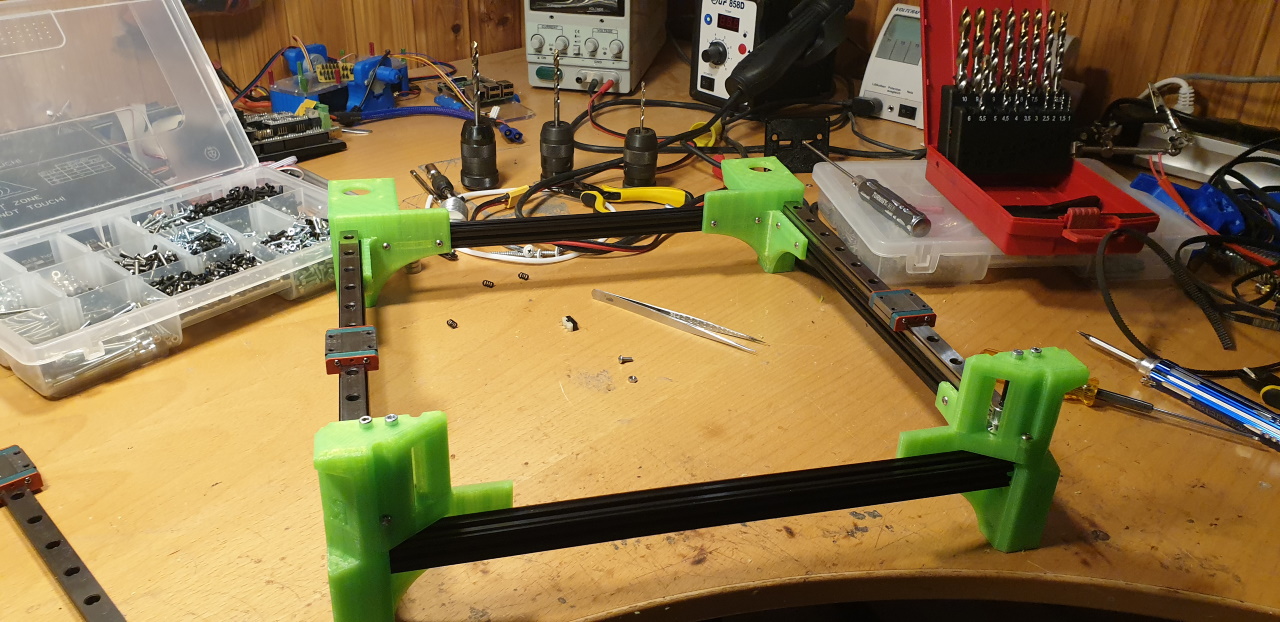
Samtliga hörn monterade.
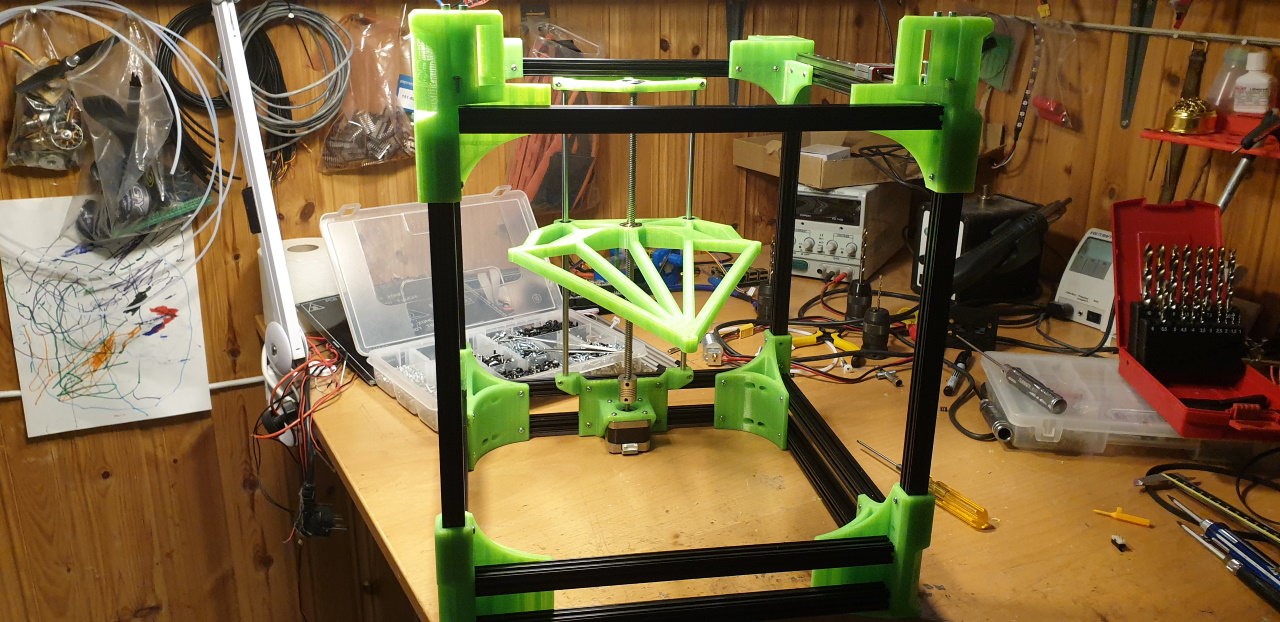
Z-profilerna provmonterade och överdelen provmonteras.
Linjärlagren monteras till printbeden och vagnen för printbed monteras.
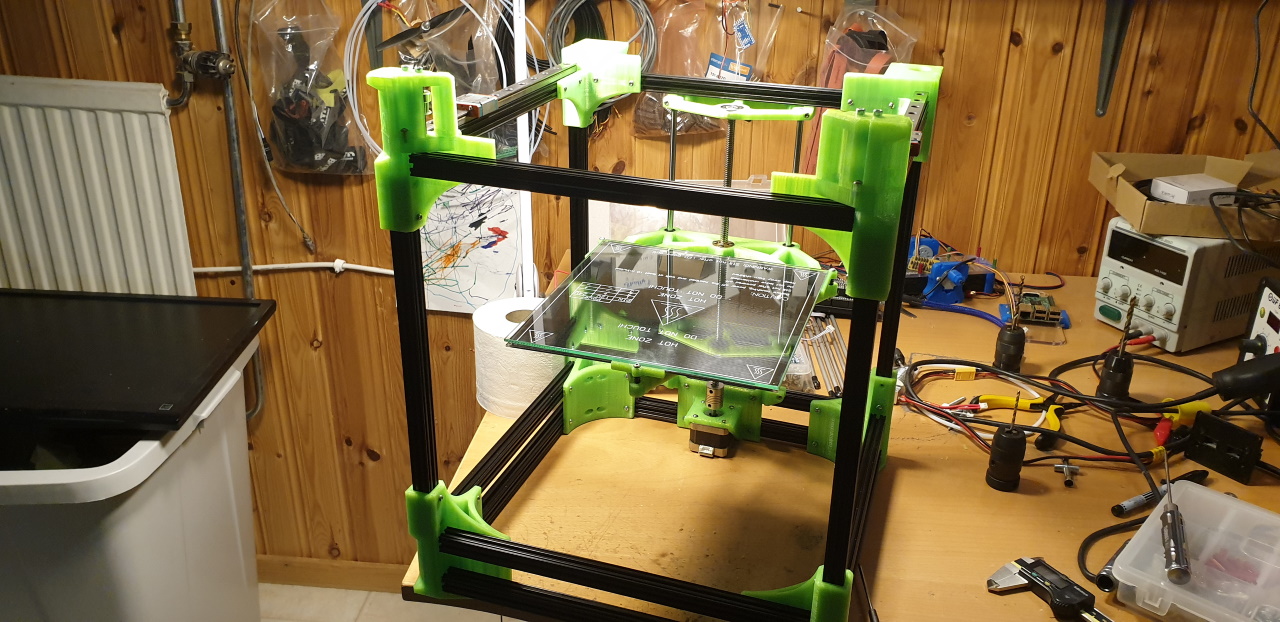
Heatmed och glasskiva monterat. Nu börjar det se ut som en skrivare. 😉
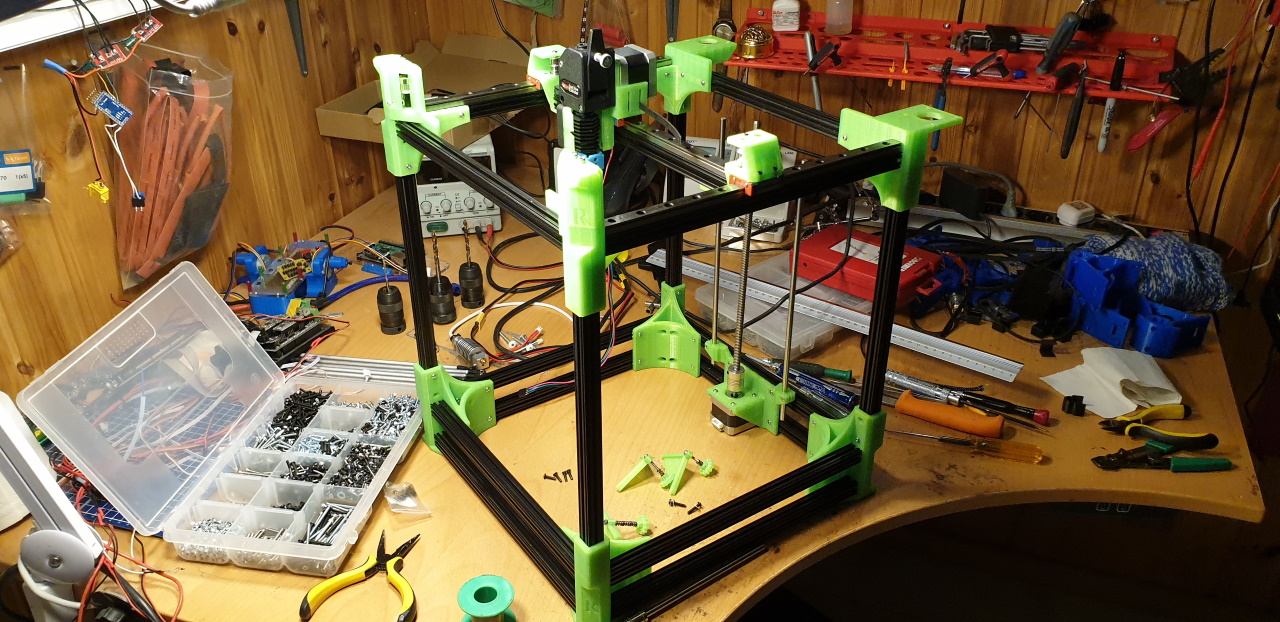
Monterat X-gantryt med extruder och hotend för att testa passform. Här hade jag läst att vagnarna på linjärlagren hade 20×20 hålbild och inte provmätt. Det visade sig att det var 20×15, så jag fick cadda om y- och x-gantryt lite.
Fick printa ny bäddhållare och övre Z-lagerfäste med hållare för Z-limitswitch och med plats för dubbla lager i bäddhållaren, så att den blir mer stabil. Den hängde lite för mycket tidigare. Fungerar inte detta får jag fräsa ut en hållare i aluminium istället.
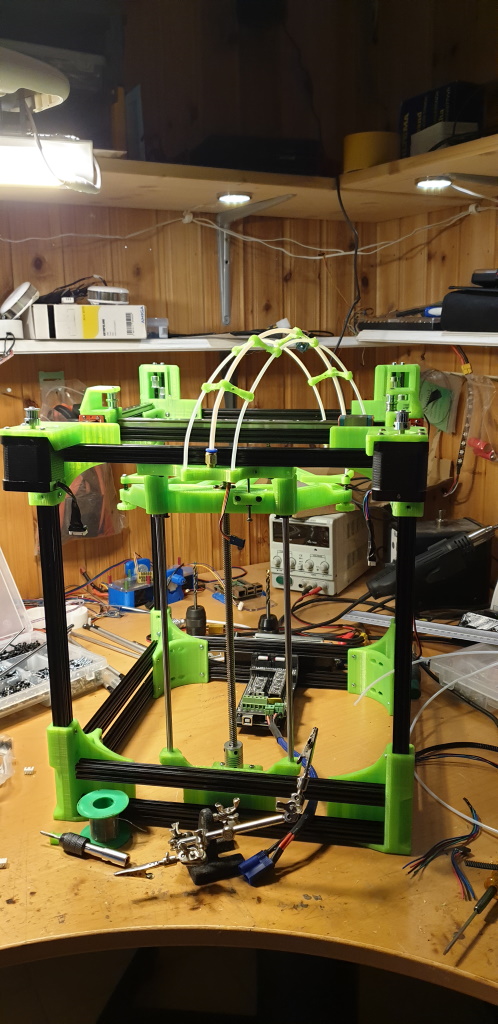
Fick lite inspiration från ett bygge på youtube och designade en ryggrad som håller filamenttuben och alla kablar som behövs till hotend etc. Det håller ordning på rubbet och ser ärligt talat rätt coolt ut. 😉
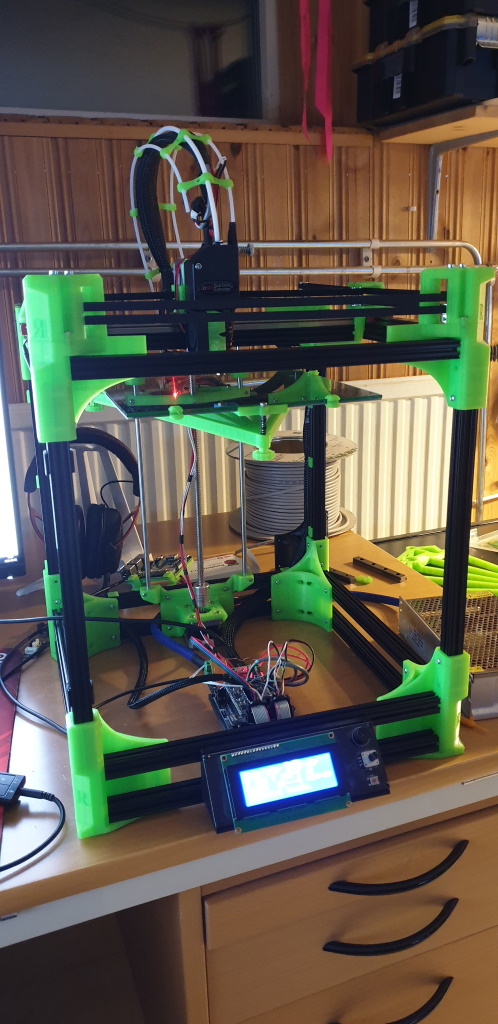
Senaste uppdateringen är att skrivaren är vid liv och rör på sig för egen maskin. Jag hade lyckats krossa tempsensorn i hotenden när jag monterade den, men i övrigt fungerar allt utan problem.
Nu ska det monteras en PEI-utskriftsplatta och en induktiv sensor för Z så att skrivaren kan anpassa sig efter en krokig utskriftsplattform, sedan ska det testskrivas lite. Jo, en rullhållare i grön plast ska designas och hakas på med, och lite kosmetiska detaljer.
Hela kalaset styrs av en Mega2650 med ett RAMPS1.4 kort, eftersom att jag hade det i min Kossel. Sedan kommer en Raspberry Pi 3 att monteras i basen på skrivaren och köra OctoPI som mina övriga skrivare.. Fortsättning följer.