
After doing a few PPG flights

I of course had to build an electric one for myself. Petrol is good and all but messing with re-fueling and mixing oil and gas, and just going to the gas station is quite tedious… so here we go.
I got ahold of an old broken paramotor from a friend and started 3D-printing prototype mounts to fit. I wanted a general solution that could easily be fitted to a range of paramotor frames so I based it all on two 25mm aluminium tubes.
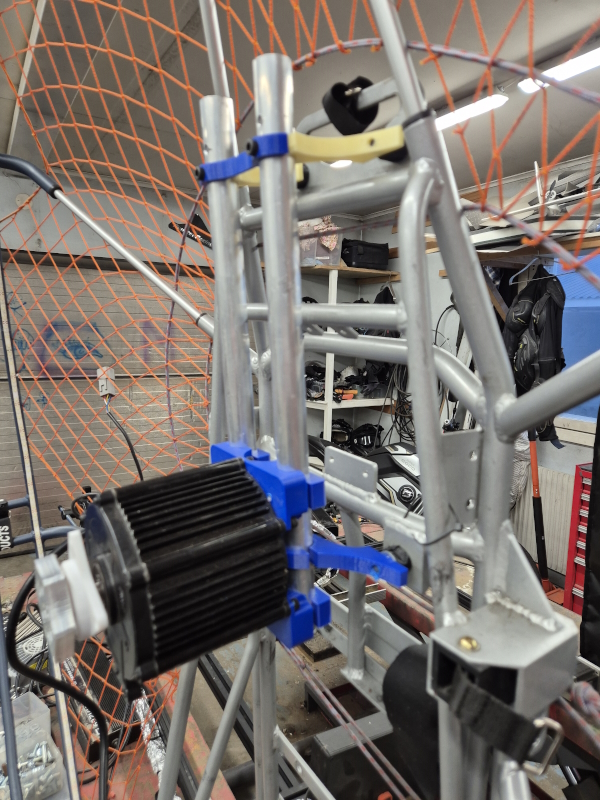
3D-printing parts is the perfect way to test fit before doing a more cumbersome and costly aluminium part.

I am basing this entire project around the XL motor from LightningRods as I had a couple of those from another project. For those of you who aren’t familiar with the LightningRods range of motors you can find more info on the LightingRods website:
https://lightning-rods10.mybigcommerce.com/

To control the motor I need to make a paramotor-style throttle grip. Have been thinking about making it wireless but that’ll get to be version 2. First we’ll have to get this one up in the air, så keeping it simple at the moment.
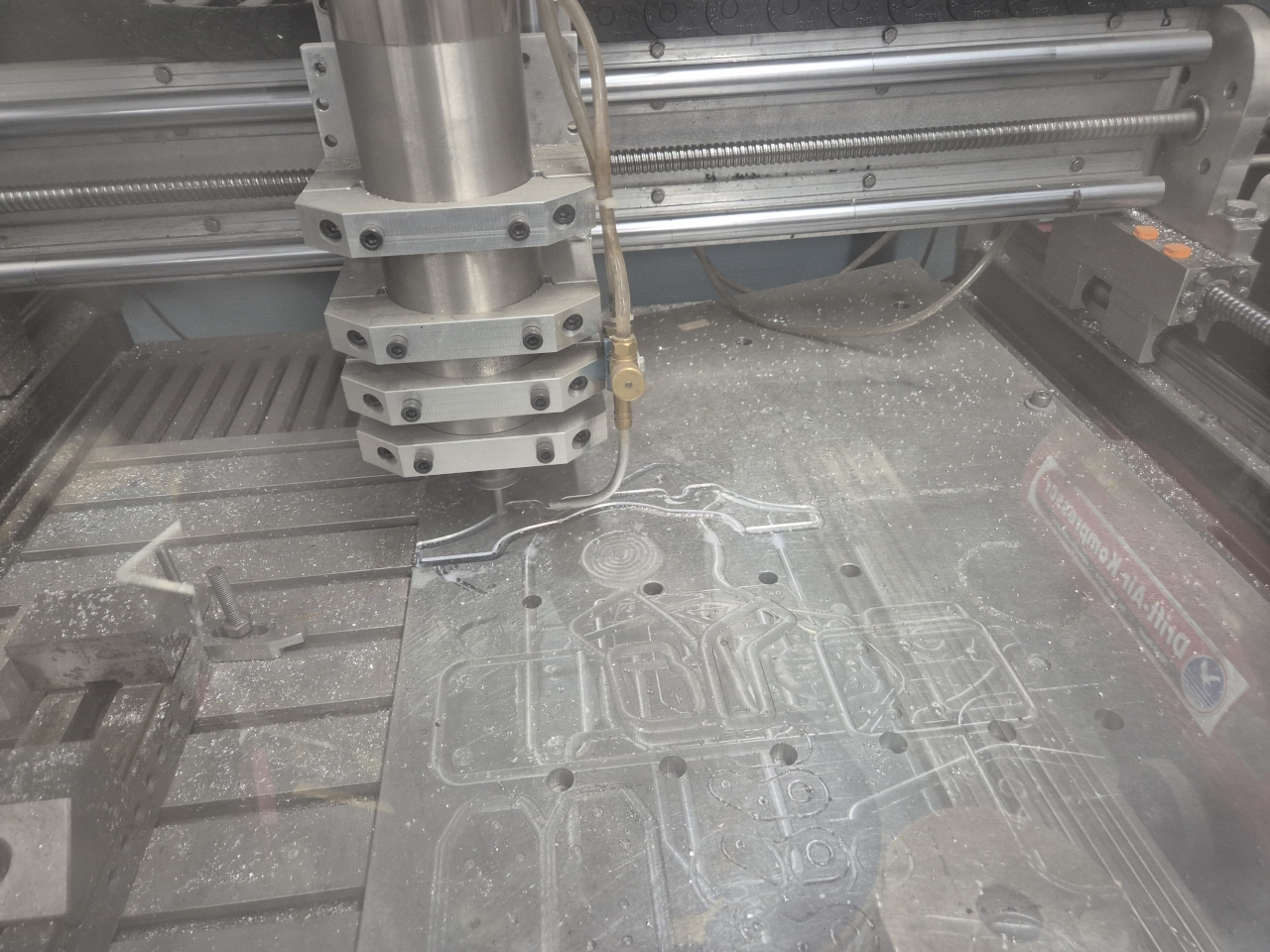
The mill got busy making parts when the test-fitting was done. Man this thing is practical.

Aluminium on aluminium just looks so dang nice. =)
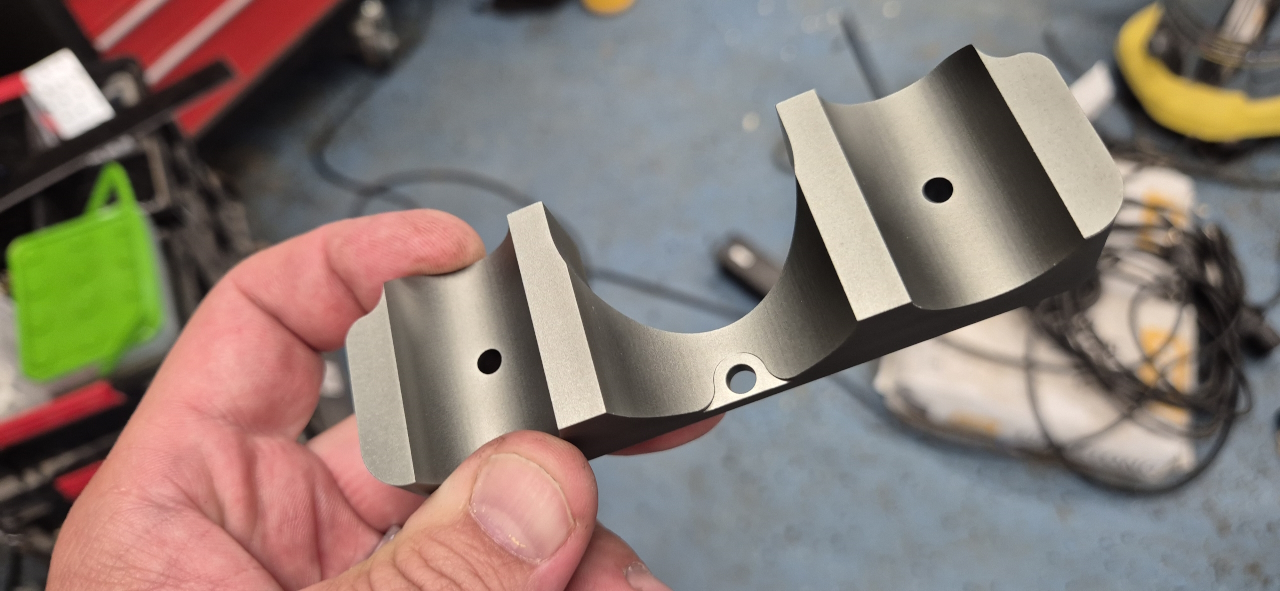
I did need one part that was hard to make on my mill. Even if I started making a larger vise to hold the part on the mill I just tried to order a couple instead. Ordering was not that expensive and the quality is outstanding! If I’m building more of these I’m going to order all parts online instead of wasting hours on the CNC mill at home.
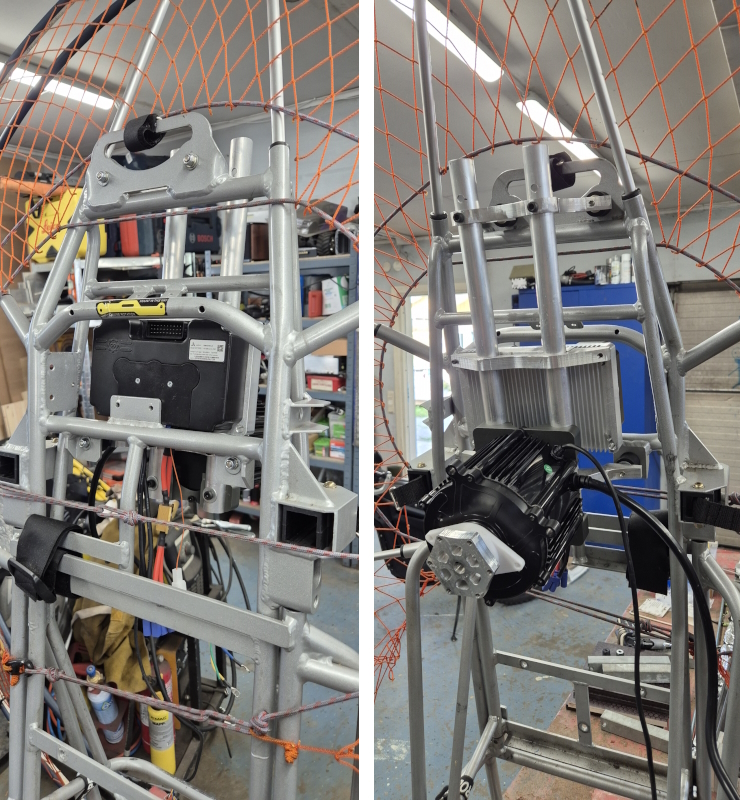
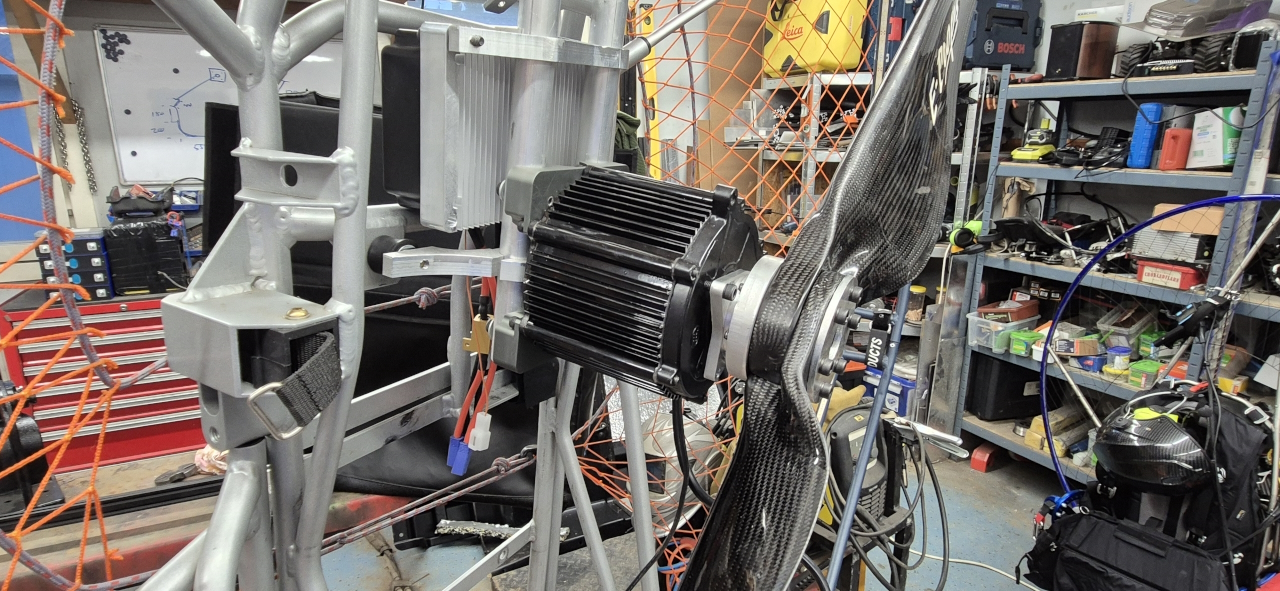
Made a mount for the FarDriver that fit on the tubes and here everything is milled except for the support bearing holder and the proper propeller mount.


Made a propeller mount for a propeller fitting a Vitorazzi Moster 185, since that’s the propellers I’ve got. On the back side a bearing is mounted and the corresponding part that bolts on to the motor gives support to the propeller. That way the internal bearings in the motor won’t see so much axial load. I did mount a regular ball bearing at first but I need to replace that with a preloaded axial bearing to unload the motor bearings better.

Milled a counter plate for the propeller and test fit it. The motor has plenty of torque and when shorting the phases there’s plenty of resistance in the propeller.
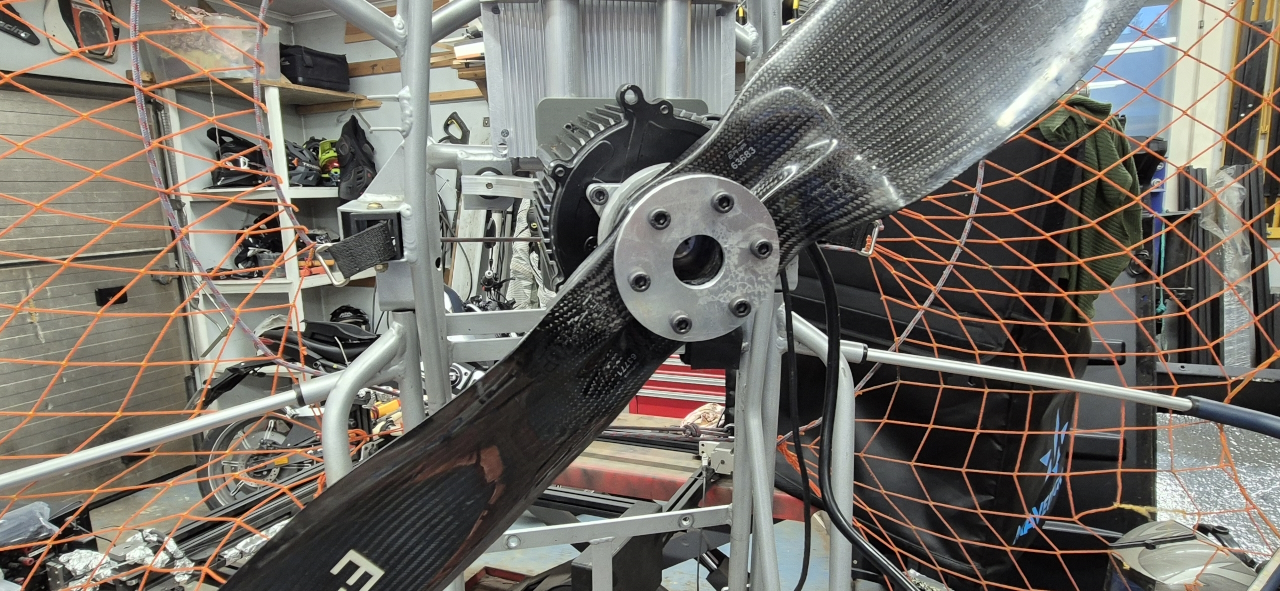
Here you can see the way the propeller support bearing and the propeller is mounted. I started out with quite a slim bearing but had to replace that with a proper ball bearing that could take more load. It’s supposed to be able to take 100kg axially but I don’t really trust those numbers.

In order for the new bearing to fit I had to do some modifications on the mill.
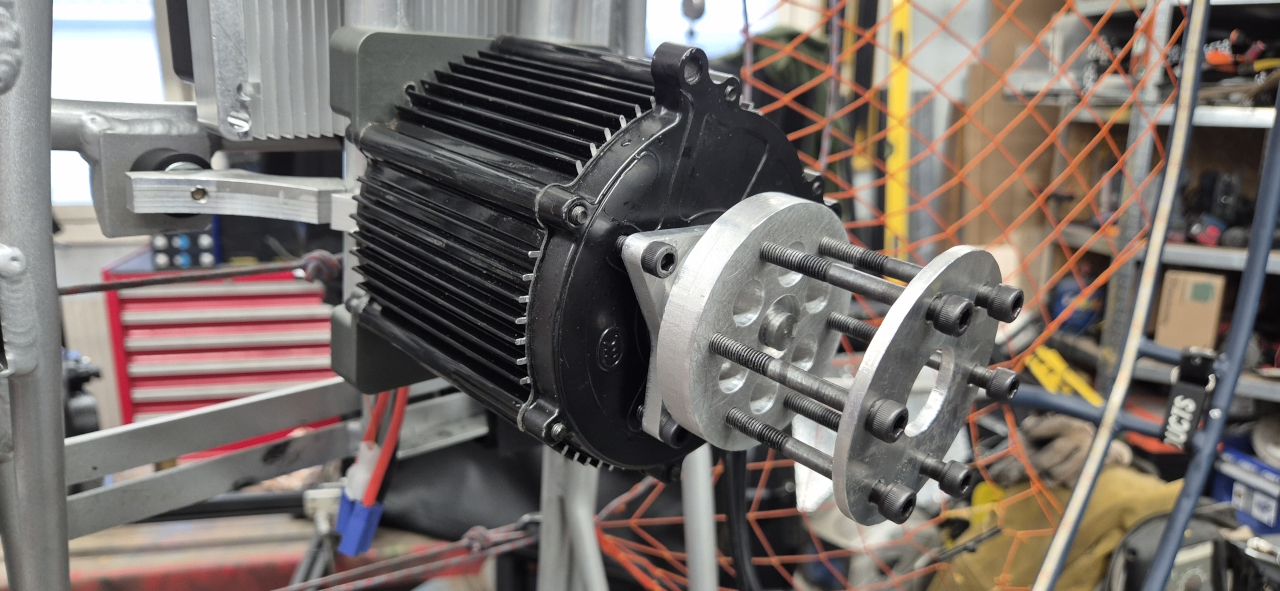
Everything feels sturdy enough and should give proper support for the forces applied when flying.

Using a battery from one of my bike builds to test this thing out. 20s10p, 30Ah good for 300A+. Total weight of the frame with controller and motor is around 12-14kg. The battery pack weighs as much and I’m guessing with the harness we’re getting closer to 30kg with one battery. I’ve got one more to connect in paralell but we’ll start off with one for testing.
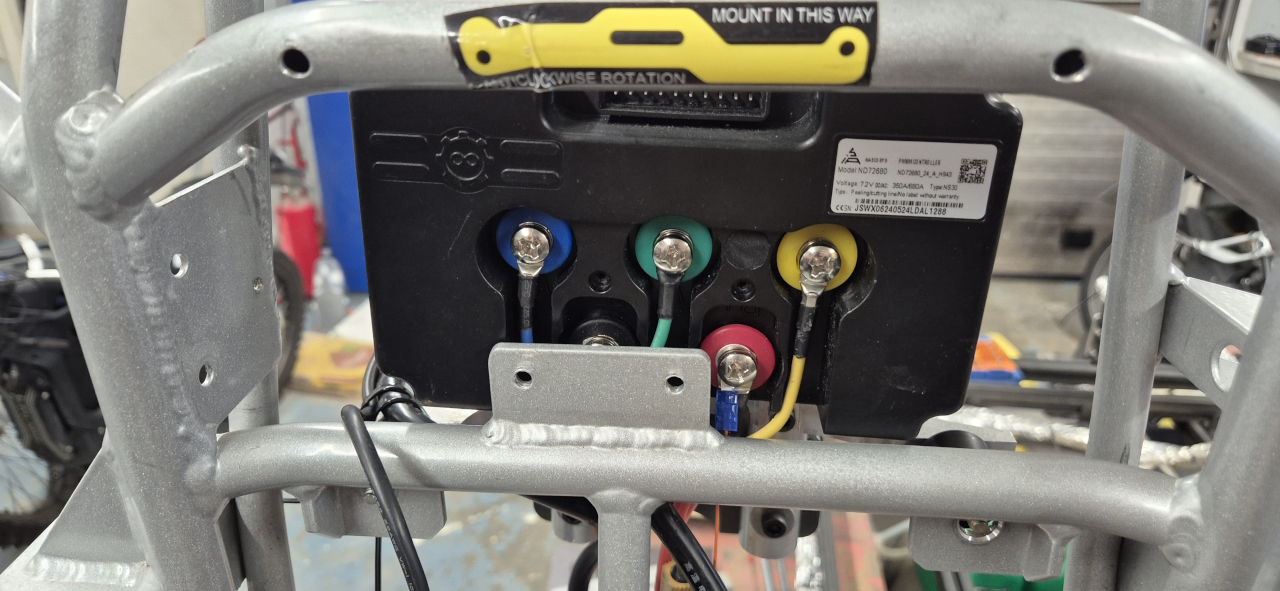
Wiring in the FarDriver couldn’t be simpler.
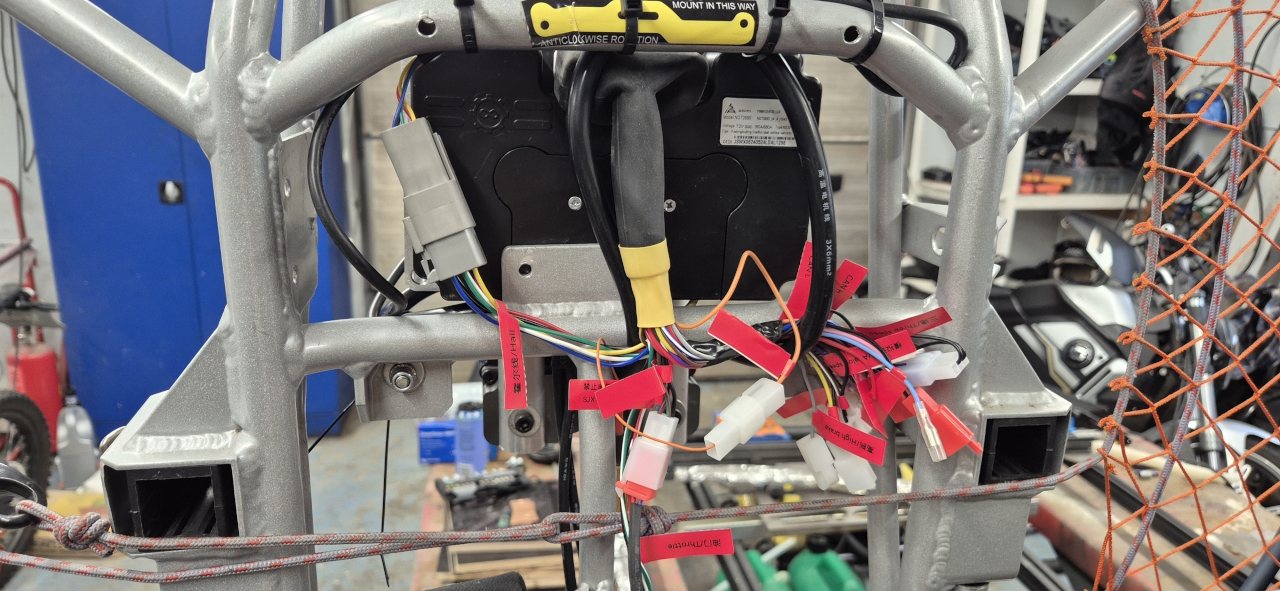
Next thing I’m doing tonight is cleaning up the wiring harness. There are loads of leads that I won’t need using the controller for flying.

Just a nice picture from my first flight ever last summer. Got quite hooked on flying after that.
The first test run of the XL-ePPG went great. Got around 2900RPM on a prop that’s good for 3000.. Nothing got warm and the motor revs out all the way. I probably could tweak the controller to use field weakening to get more speed but we’ll keep it like this for the time being. The battery sat at 6% charge when I started testing too, so the BMS limited the output.. it’ll be interesting to see what this can do under a glider..
Stay tuned for updates..