Så var det första elektronikprojektet för hemmet driftsatt. Det började med att vi byggde en ny hörna till köket med glasrutor i skåpdörrarna, och har man fönster måste man ju ha belysning. 😉
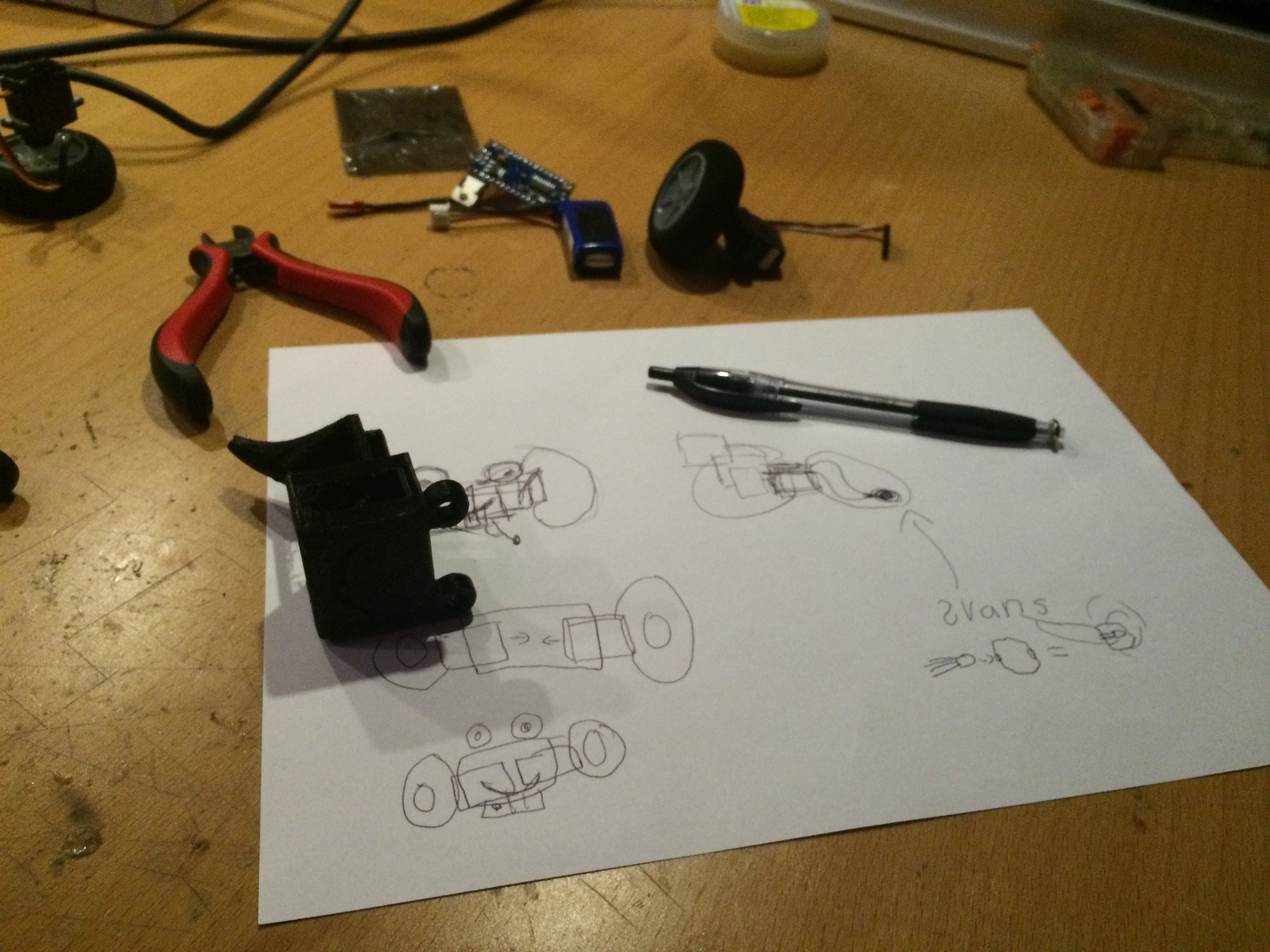
Började med att cadda upp och skriva ut hållare till vanlig RGB-lysdiodlist som man köper billigt på ebay:
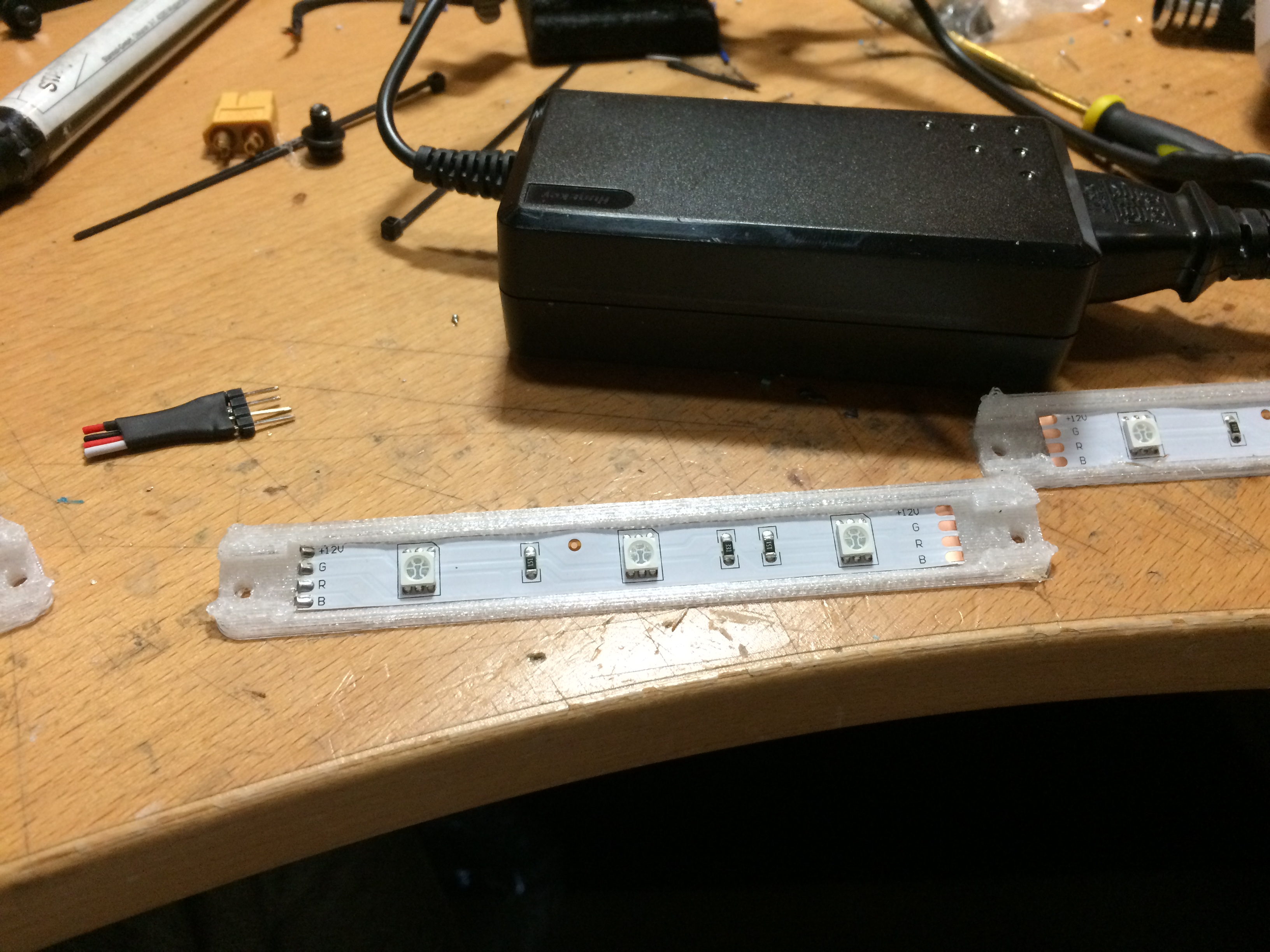
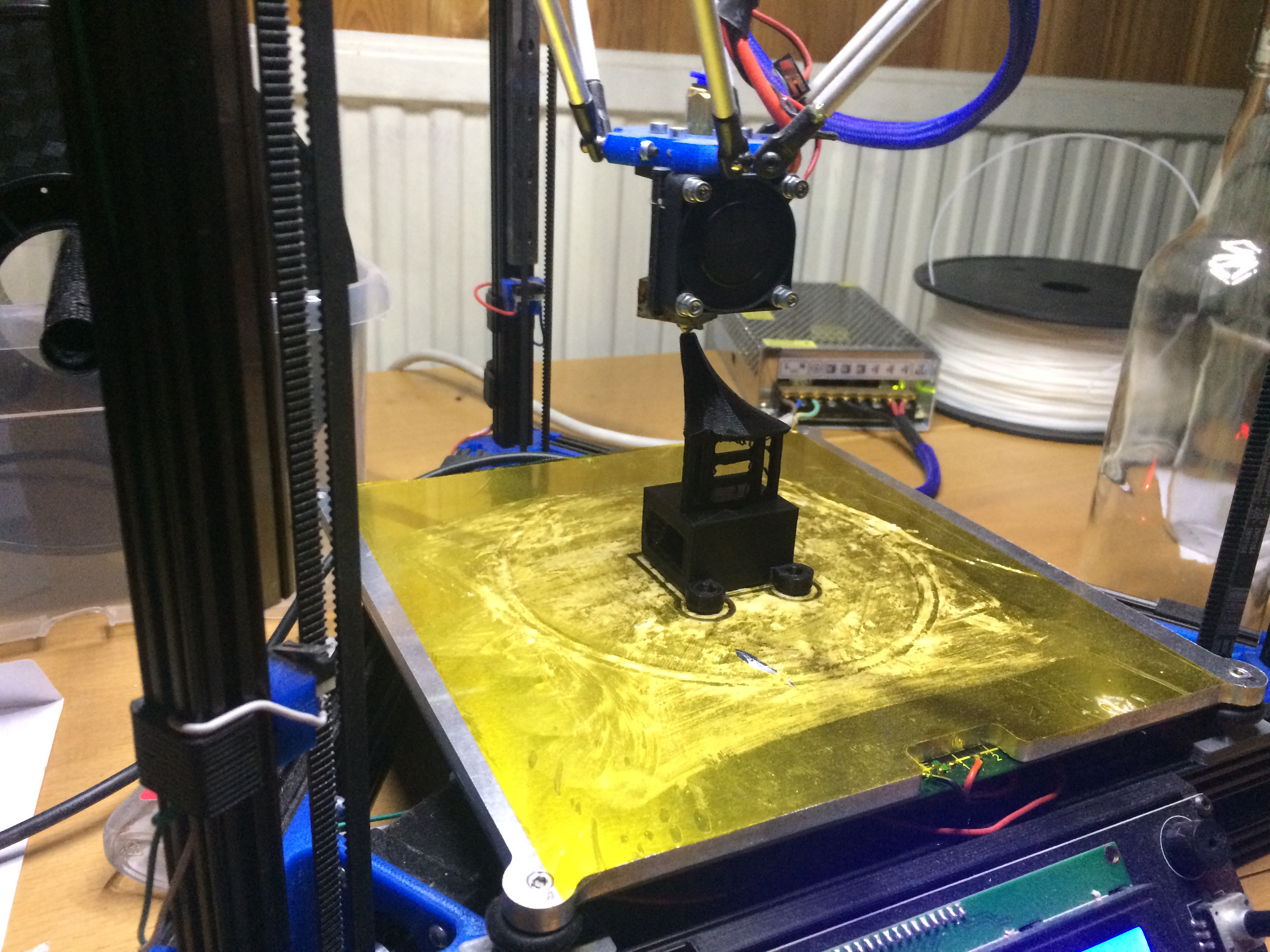
Skrev ut i transparent PETG plast vilket fungerade utmärkt. Ett 1mm tjockt lock är tillräckligt diffust för att sprida ljuset bra.
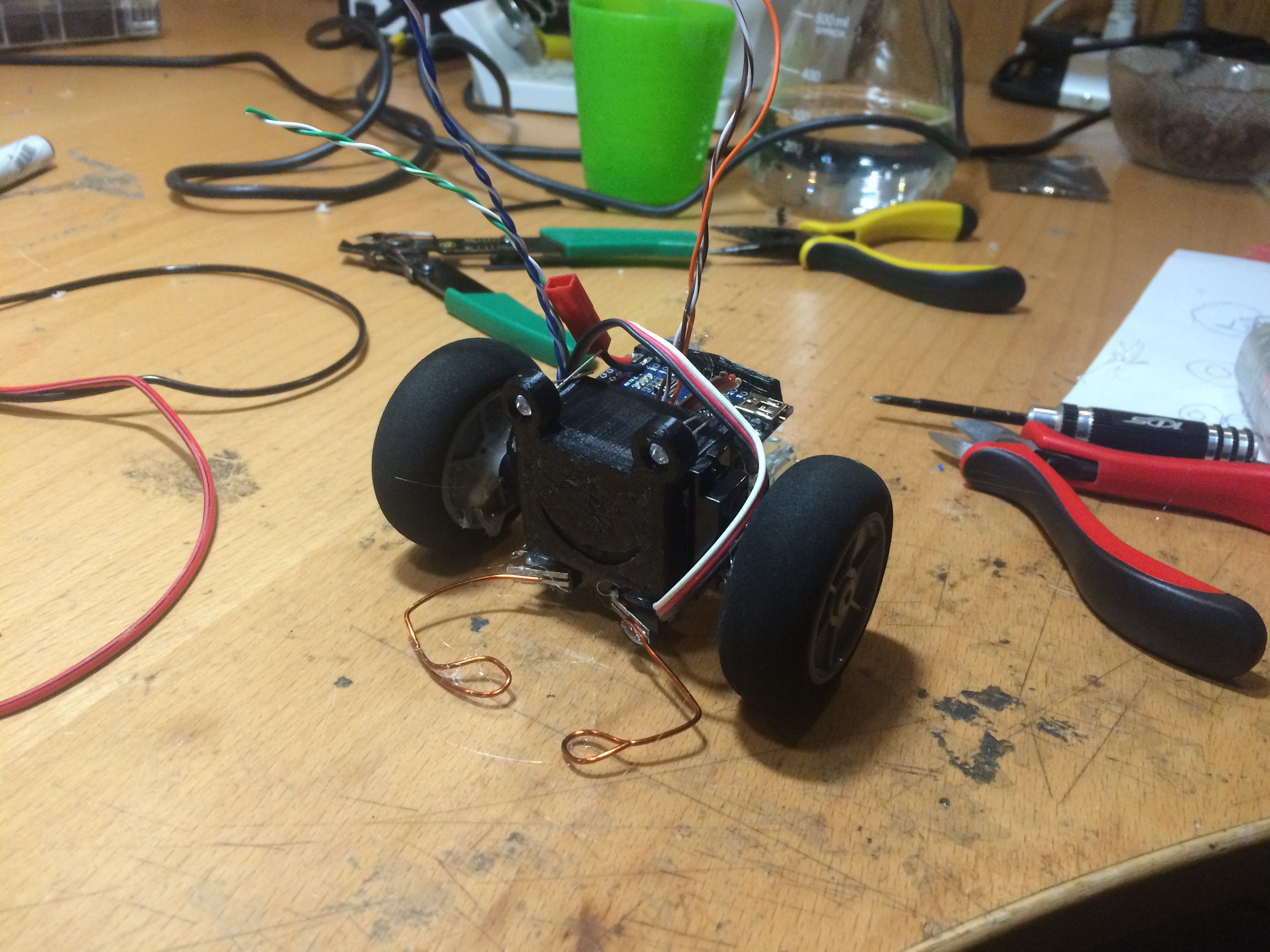
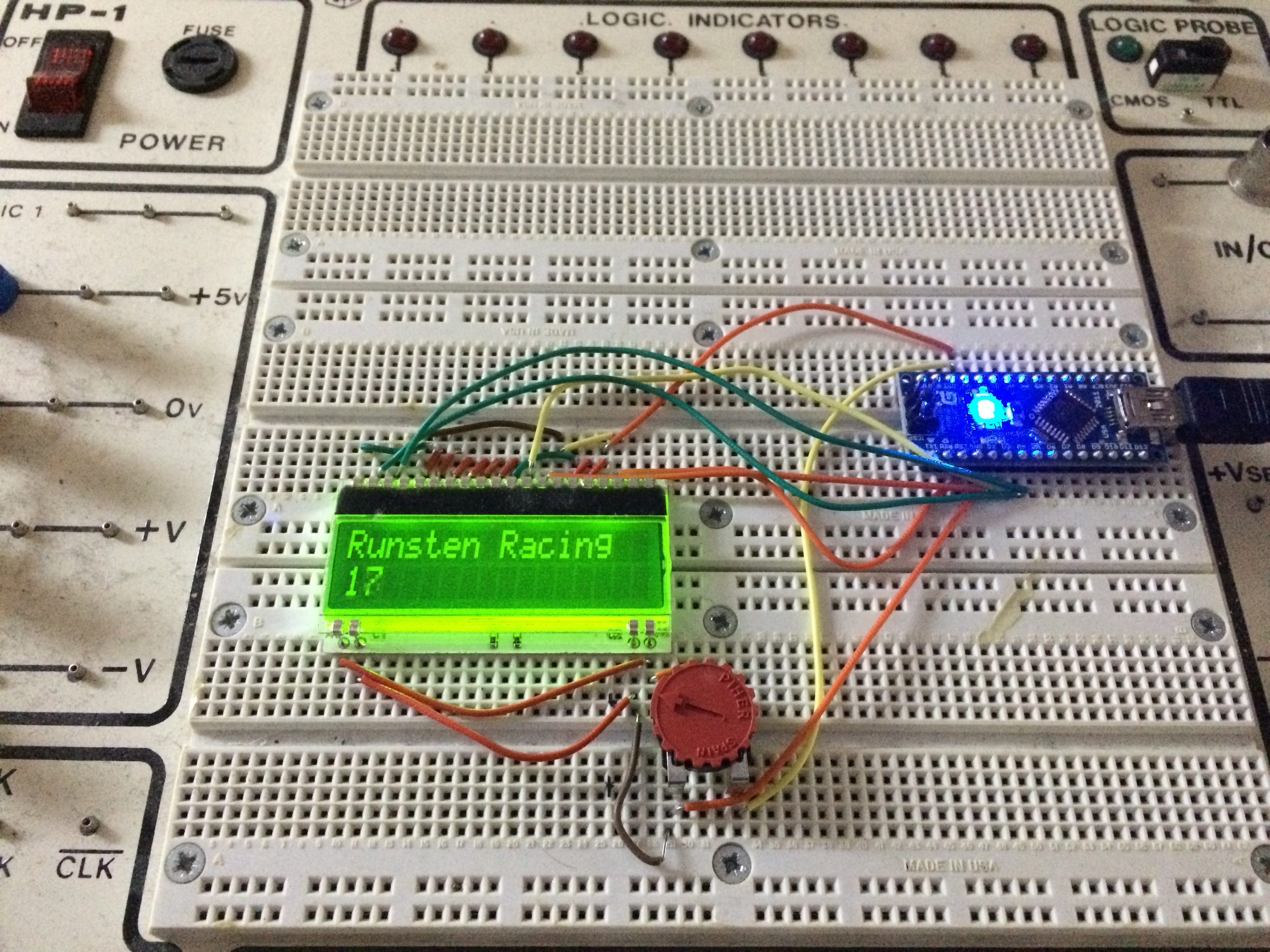
Hade planerat att montera 6 lister i varje skåp, men efter en snabb test insåg vi att det troligen räcker med en. Lödde därefter ihop en drivare av en arduino och ett par mosfet:ar:
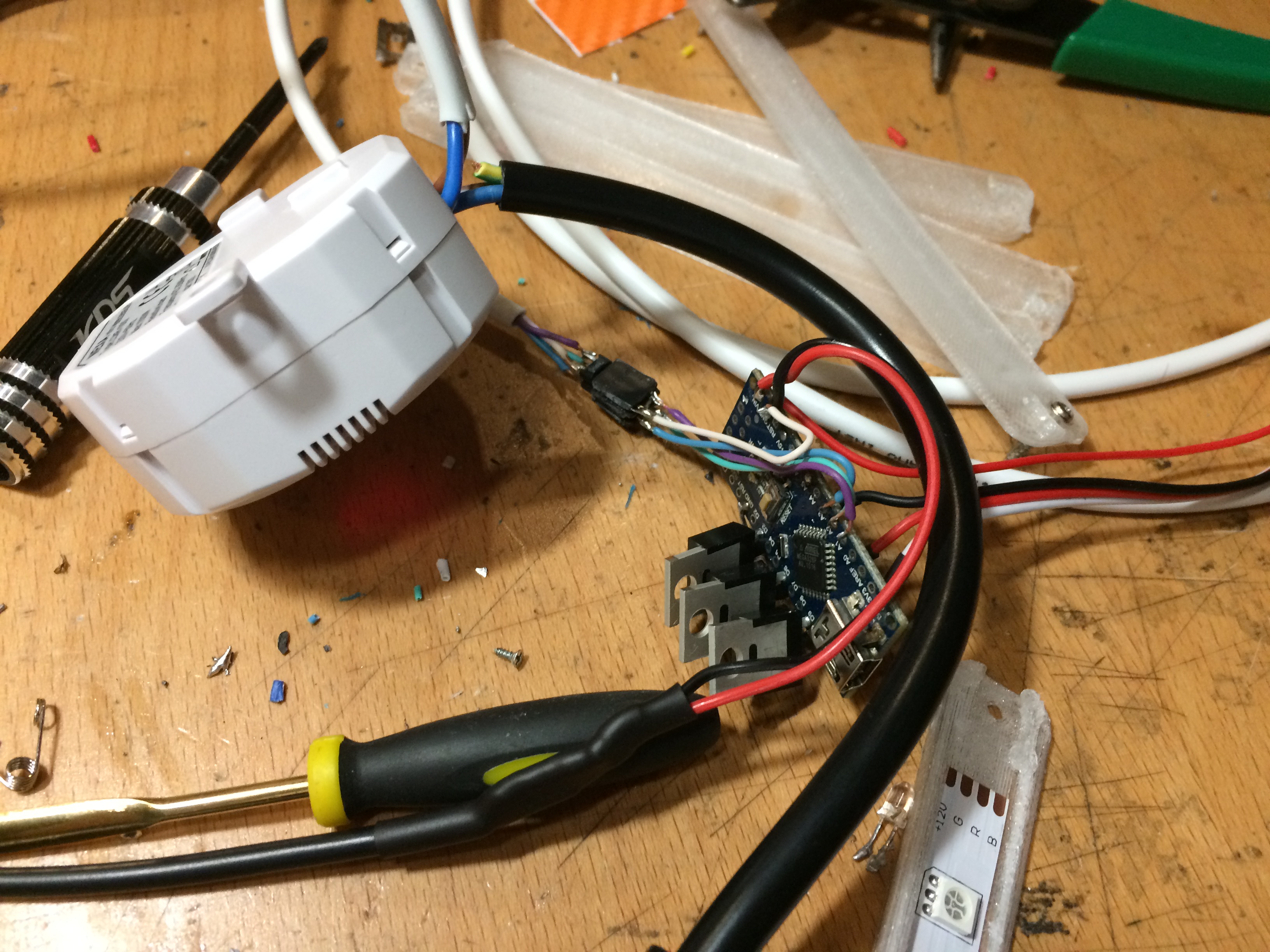
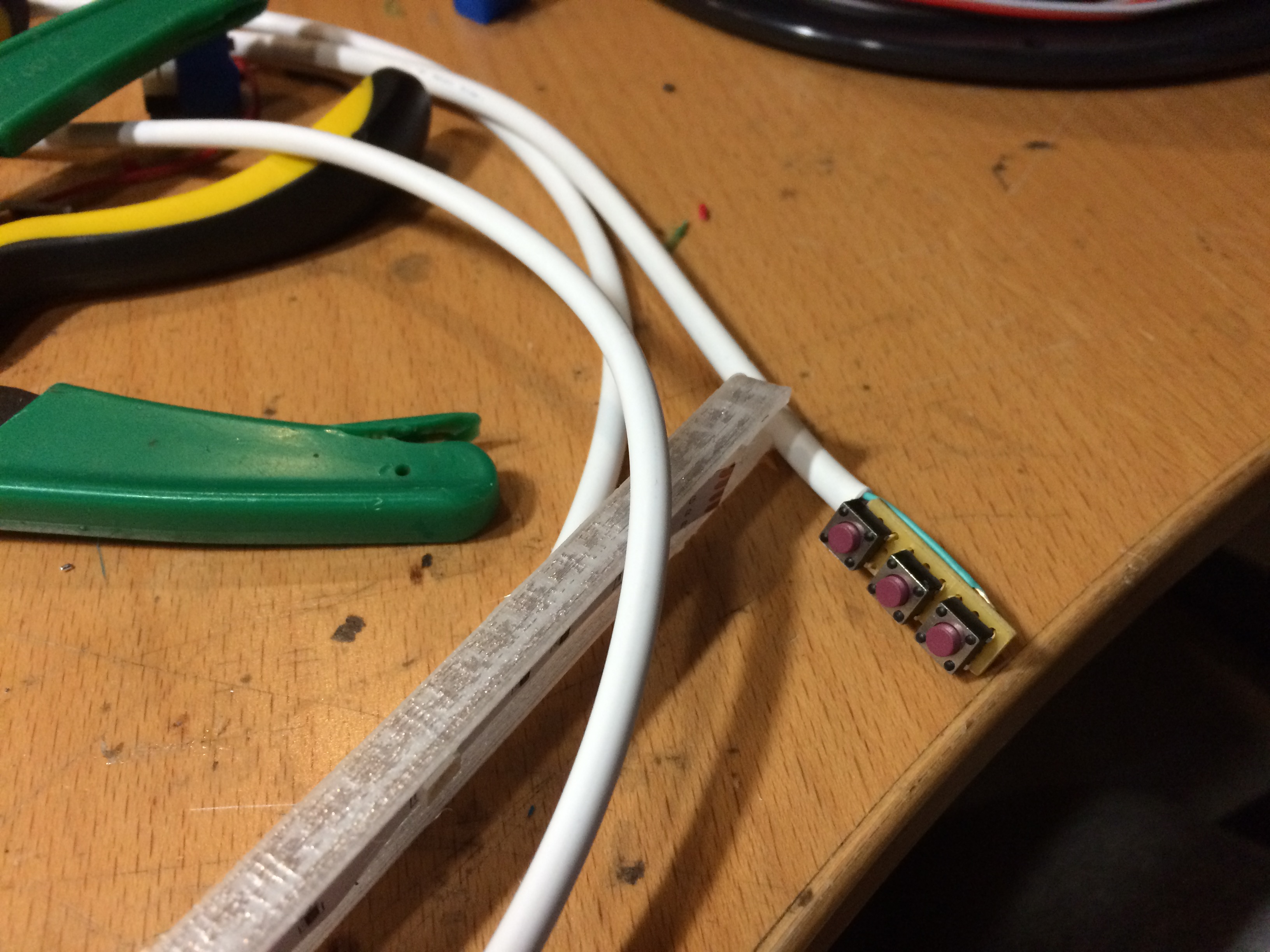
För att få det snyggt och praktiskt använder vi en NEXA-switch för att styra hela kalaset, och tanken var att via mobiltelefonen kunna ställa in vilken färg man vill att det ska lysa, men då jag inte fått mina beställda 3,3v regulatorer ännu och det var dags att göra projektet klart så fick det bli en trådbunden fjärr istället:
Listerna monterades och löddes på plats för att slippa en massa kontakter..

.. och fjärrkontrollen fick bli självhäftande och klamrades fast ..

Resultatet då?

Lyser skapligt, och lite variation i färgerna kan man ju ha beroende på humör och årstid..



Resultat: Lysande!
😉